
【作 者】
1 Woo-Sung Choi 韩国朝鲜大学电子工程学院 2 Hong-Gi Yeom 韩国朝鲜大学IT-Bio交叉学院
【资 金】
本研究得到韩国朝鲜大学研究基金(2020)资助。
【摘 要】 脑机接口 (BCI) 是一种很有前途的技术,可以分析大脑信号并根据用户的意图控制机器人或计算机。本文介绍了我们的研究,以克服在日常生活中使用 BCI 的挑战。有几种方法可以实现 BCI,例如感觉运动节律 (SMR)、P300 和稳态视觉诱发电位 (SSVEP)。这些方法根据 BCI 类型有不同的优缺点。然而,所有这些方法的选择都是有限的。根据意图控制机械臂使BCI用户可以做各种事情。我们介绍了使用非侵入性方法预测 3D 手臂运动的研究。此外,该研究被描述为使用外部相机补偿预测以实现高精度。对于日常使用,由于预测错误,BCI 用户应该能够打开或关闭 BCI 系统。用户还应该能够将 BCI 模式更改为高效的 BCI 类型。BCI 模式可以根据用户状态进行转换。我们的研究解释了基于大脑的功能连接和卷积神经网络 (CNN) 估计用户状态。此外,BCI 用户应该能够同时执行各种任务,例如搬运物体、走路或说话。一项多功能 BCI 研究被描述为通过单个分类模型同时预测多个意图。最后,我们对 BCI 研究的未来方向提出我们的看法。虽然在日常生活中使用 BCI 仍有很多局限性,但我们希望我们的研究能够成为开发实用的 BCI 系统的基础。
关键词: 脑机接口(BCI);BCI 挑战;多功能脑机接口;感觉运动节律(SMR);P300 ; 稳态视觉诱发电位(SSVEP);定向调谐;手臂运动预测;预测补偿
1. 引言
脑科学与人工智能技术的融合备受关注。一个典型的例子是脑机接口(BCI)[1]。BCI 是一种可以测量和分析大脑信号以预测用户意图并根据他们的选择控制机器人或计算机的技术 [2]。人进行运动时,大脑产生运动指令,通过脊髓传递到周围神经,使身体运动[3]。然而,假设这些通路中存在脊髓损伤 (SCI) 或闭锁综合征 (LIS) 等问题。在那种情况下,即使大脑发出运动指令,身体也根本无法移动 [4]。使用 BCI 技术,即使是瘫痪的病人也可以通过打字来表达他们的意图。他们还可以通过控制机器人喝水,并可以驾驶电动轮椅前往所需的位置[2]。BCI 技术也对健康人有益。通过BCI技术,无需移动身体,只需思考即可轻松控制各种电子设备,如改变电视频道、调节空调温度、调节音乐音量等。BCI 还可用于游戏、军事目的和老年人。因此,BCI 技术的社会和经济连锁反应是巨大的。
有几种方法可用于实施 BCI,例如感觉运动节律 (SMR)、P300 和稳态视觉诱发电位 (SSVEP) [2]。基于 SMR 的 BCI 是一种使用初级运动皮层解剖结构的方法。大脑的不同部分负责各自的功能。运动皮层的α波(8~13Hz)和β波(13~30Hz)会根据运动意图而增加或减少。例如,当用户想要移动他们的手或脚时,相应的运动皮层上的 α 波和 β 波的功率会降低 [2,5,6,7,8]。因此,BCI系统可以利用大脑区域的功率变化来预测左手、右手或脚的运动意图。SMR-BCI 通常用于控制鼠标光标或电动轮椅。用户可以根据脚、左手或右手的移动意图来控制光标或轮椅的前、左或右方向。SMR-BCI 很直观。然而,这种方法需要较长的运动想象力训练时间[7]。P300 是刺激后约 300 ms 顶叶区脑信号的正峰值 [5]。当用户想要在多个刺激中进行选择时,P300 在刺激时最大。因此,基于 P300 的 BCI 可以通过选择最大的 P300 刺激来预测用户想要的目标。P300- BCI通常用于通过查看字符 [9,10,11]来键入字母。尽管需要监视器和视觉刺激,但它们可用于在众多选项中进行选择。基于 SSVEP 的 BCI 利用以下事实:脑电图 (EEG) 强度的增加频率与来自用户的视觉刺激在不同频率下眨眼的视觉刺激中的频率相同 [2,12]。SSVEP-BCI 的用户可以在多个视觉刺激中快速选择目标。一般来说,SSVEP 在三种 BCI 方法中显示出最高的准确度。SSVEP-BCI 还需要监视器和视觉刺激。SSVEP 的刺激会使用户的眼睛疲劳[13]。
如上所述,根据 BCI 类型 [14,15] ,BCI各有利弊。然而,所有这些方法的选择都是有限的。这意味着这些 BCI 的用户只能执行预定的任务,例如选择轮椅方向或角色。用户不能做新的工作,例如喝水或刷牙。本文旨在介绍我们的研究,以克服以往 BCI 方法在实际应用中的局限性。
2. 克服 BCI 局限的研究
2.1 手臂运动预测
如果 BCI 用户可以像自己一样控制机械臂,他们每天可以做各种各样的事情。因此,许多研究小组都试图预测手臂运动并控制机器人手臂。有必要确定大脑活动如何根据手臂运动变化来预测它。1982 年,Georgopoulos 发现初级运动皮层神经元的放电率根据手臂运动的方向而不同 [16]。这意味着神经元对动作有方向偏好。Georgopoulos 还发现可以根据神经元的放电模式预测手臂运动 [17]。Georgopoulos 的这些研究成果成为通过根据大脑信号预测手臂运动来控制机械臂的研究基础。2008 年,匹兹堡大学的一个研究小组在猴子实验中通过实时控制机械臂成功吃到了棉花糖 [18]。布朗大学和匹兹堡大学的一个研究小组分别在 2012 年和 2013 年通过实时控制机械臂与四肢瘫痪患者一起成功饮用饮料 [19,20]。然而,现有的用于预测手臂运动的 BCI 方法通过将针状电极插入大脑来测量大脑信号。这种侵入性方法需要手术并导致脑细胞损伤。此外,侵入性方法使得随着时间的推移难以测量信号 [21]。
为了解决这些问题,我们在 2013 年开发了一种无需手术即可使用脑磁图 (MEG) 信号预测三维手臂运动的技术 [4]。可以以具有统计学意义和相当高的准确度估计运动(p < 0.001,平均r> 0.7) 来自所有九个科目。我们基于时频分析分析 MEG 信号,并使用通道选择、带通滤波 (0.5-8 Hz) 和下采样 (50 Hz) 提取运动预测特征。使用下采样 MEG 信号的 200 ms 间隔(11 个时间点)预测当前运动。然后,使用多元线性回归方法估计运动的 x、y 和 z 速度。从 -60 到 -140 毫秒的 MEG 信号至关重要,200-300 毫秒的间隔足以预测当前的运动。据我们所知,在我们研究之前,只有一篇论文使用非侵入性神经信号预测了 3D 手臂运动。然而,该研究的准确性非常低(平均r = 0.19-0.38),并且由于实验范式,预测结果不可靠[4,22]。在我们最近的研究中,使用 LSTM 而不是多元线性回归 [23],预测精度得到了极大的提高。
2.2 使用图像处理进行校正
通过上述研究,我们可以用非侵入性方法估计运动。然而,控制机械臂抓取目标的准确度普遍较低。例如,侵入性 BCI 方法的伸手和抓握动作的成功率为 20.8-62.2%,尽管实验任务很简单 [19]。将一个垒球放在柔性棒上作为实验中的目标。尽管机械臂大致到达了目标,但由于机械臂没有准确地到达物体,因此抓取经常失败。运动预测中的一个小不准确导致任务失败。
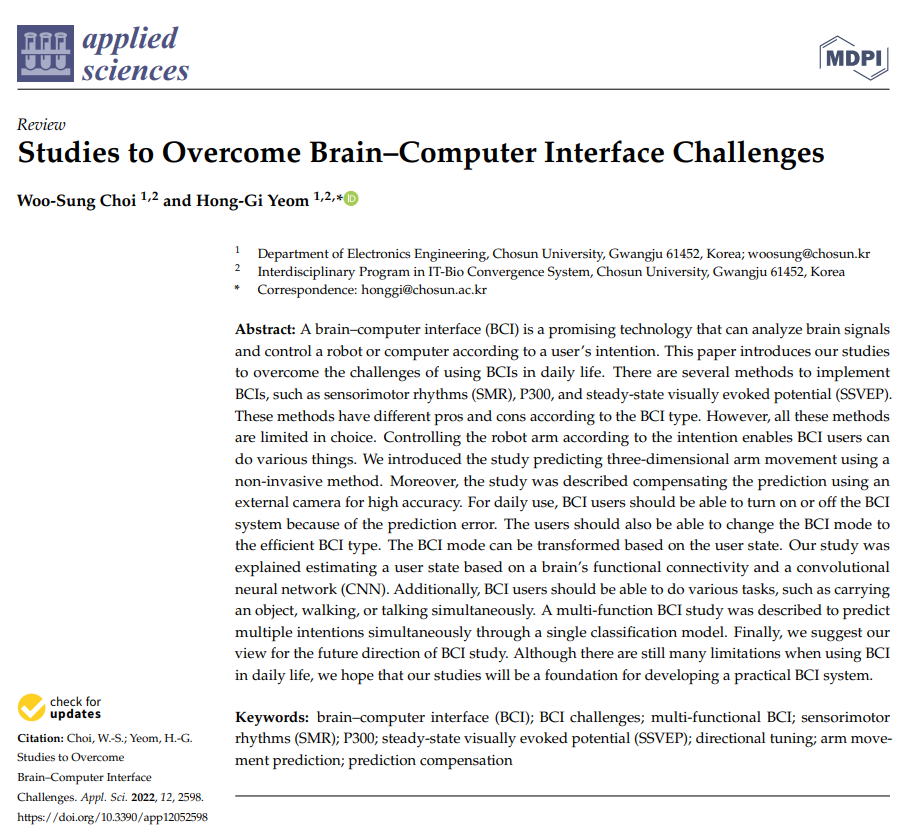
我们提出了一种新颖的预测方法,即反馈预测算法 (FPA),以使用如图 1所示的图像信息来提高精度[24]。使用图像处理技术可以很容易地计算出物体的位置。FPA 根据对象位置对预测进行补偿。该方法根据预测的方向在多个对象中预测目标。它根据目标位置校正预测。我们应用卡尔曼滤波器来补偿预测。补偿后的矢量乘以自动计算的权重值以轻松到达目标。即使用户改变了运动方向,预测轨迹也可以修正为改变的方向,因为 FPA 在每一步都进行预测和修正。使用 FPA 对所有 9 名受试者进行运动预测的准确性显着提高,并且减少了 32.1% 的错误。尽管有一些研究使用目标位置来修改预测[25,26]。 因此,以前的方法不适合在现实生活中控制神经假体。
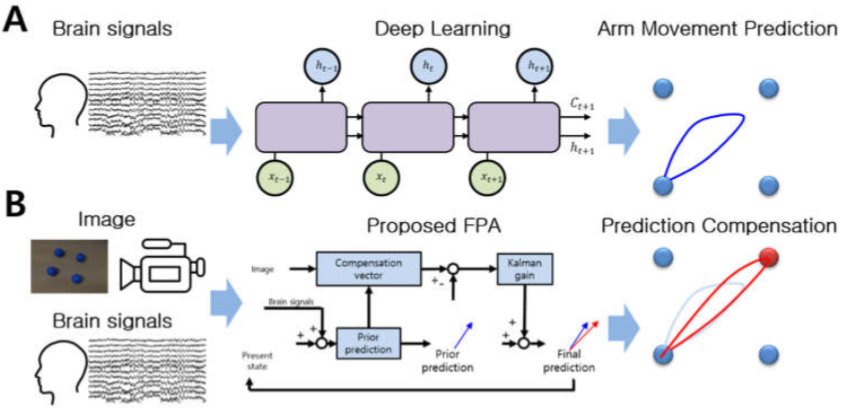
图 1. 来自大脑信号的手臂运动预测和基于图像处理的补偿。( A ) 我们开发了无需手术即可使用 MEG 信号预测 3D 手臂运动的技术。( B ) 我们提出了一种新的预测方法 FPA,以利用图像信息提高准确性。
2.3 用户状态预测
虽然我们可以使用我们的方法高精度地预测手臂运动,但仍然存在问题。匹兹堡大学的研究团队透露,在静止状态下可能会出现严重的运动预测错误[27]。这意味着如果 BCI 用户什么都不做或睡觉,大脑控制的机器人可以以危险的方式运行。因此,用户应该能够根据自己的需要打开或关闭 BCI 系统。此外,不同类型的 BCI 有不同的优缺点。通过控制机械臂来输入字符或控制轮椅具有挑战性。因此,BCI 应该能够预测用户状态并将合适的 BCI 模式应用于系统。
我们开发了一种可以预测用户状态以改变 BCI 类型的技术,如图2所示[28]。可以基于大脑的功能连接和卷积神经网络 (CNN) 来估计用户状态。共同平均参考 (CAR) 和带通滤波应用于 EEG 信号。滤波后,系统计算脑电信号之间的互信息(MI)作为功能连接。MI 用作 CNN 输入。CNN 将用户状态预测为四种状态(休息、语音图像、腿部运动图像和手部运动图像)。应用五折交叉验证来评估可行性。10 名受试者的状态预测平均准确率为 88.25 ± 2.34%。这意味着使用功能连接和 CNN 可以预测用户状态和改变 BCI 模式。
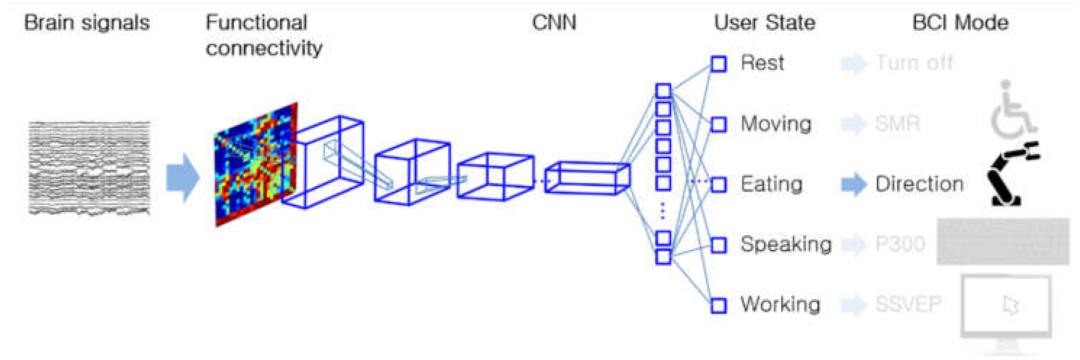
图 2. 基于用户状态的模式可变 BCI。我们提出了使用功能连接和 CNN 的模式可变 BCI。
2.4 多功能脑机接口
现在,BCI 用户可以通过根据用户状态改变 BCI 类型来控制各种电子设备,例如计算机、轮椅或机器人。虽然 BCI 系统对用户有帮助,但仍然存在问题。用户一次只能控制一台设备。然而,用户在现实生活中经常同时执行多项任务,例如搬运物体、走路和说话。因此,为方便起见,BCI 系统应该能够同时预测各种意图。为此,我们开发了一个多功能 BCI 系统,该系统可以使用单个预测模型同时预测多个意图,如图 3所示[29]。多功能BCI系统采用CAR和带通滤波。滤波后,系统执行功率谱和归一化。最后,人工神经网络从归一化的功率谱中预测多个意图。所提出的 BCI 的预测准确率为 32.96%。虽然准确率不是很高,但明显高于机会水平(1.56%)。我们正在进行的研究将使用深度学习算法提高多个意图的预测准确性。此外,我们将开发一个可以实时工作的多功能脑机接口。
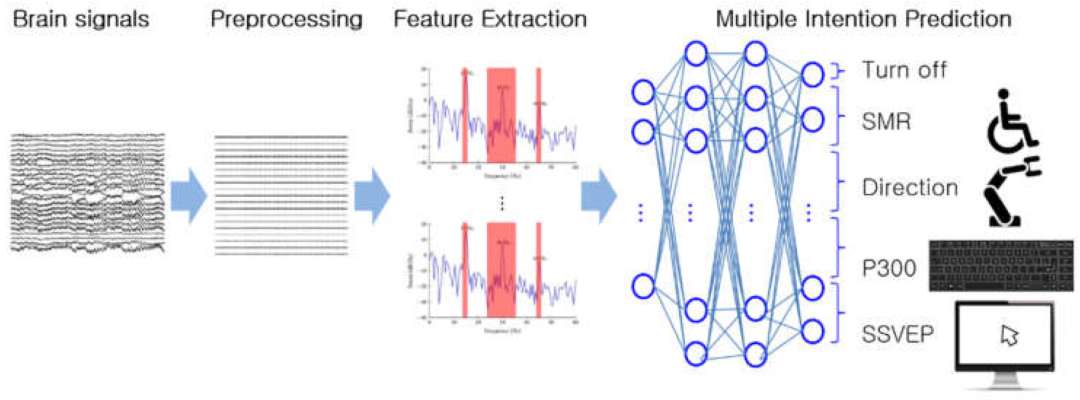
图 3. 多功能 BCI。我们开发了多功能 BCI 系统,该系统可以使用单个预测模型同时预测多个意图。
3. 讨论
在过去的几十年里,有很多 BCI 研究。他们通常专注于提高预测精度的方法 [5,8,23,30,31,32],增加命令数量 [12,33],提高信息传输率 (ITR) [34,35,36,37,38],或减少培训工作量 [7,30,34,39]。为了提高预测精度,新的分类算法 [ 30 ,40,41]或特征提取方法已被提出[31,32,42]。最近的 BCI 研究经常应用深度学习算法来实现高精度 [5,23]。使用深度学习的 BCI 研究显示,运动图像任务的预测准确率为 99.38% [30]。此外,还提出了各种刺激呈现方法来增加命令的数量[12,15,43]。最近的一项研究通过组合不同的频率信号实现了一个 160 个字符的拼写器 [12]。BCI 领域的另一个关键问题是在保持高精度的同时提高打字速度。典型相关分析 (CCA) 常用于 SSVEP 拼写器,并显示出良好的ITR性能[35,36,44]。一项结合眼动仪和 SSVEP 的混合 BCI 研究实现了相当高的 ITR [37,38]。混合研究的准确率和 ITR 分别为 95.2% 和 360.7 bpm [38]。为了减少测量训练数据的时间,通常使用数据增强或迁移学习方法 [39]。通过扩充数据,可以用更少的数据训练预测模型。可以通过使用滑动窗口 [45] 裁剪信号、添加噪声 [46] 或分割和重新组合信号 [47] 来实现数据增强。最近的研究还使用生成式深度学习算法来创建人工神经信号作为训练数据 [48,49]。减少获取时间的另一种方法是迁移学习。它利用新主题的预训练模型 [50,51]。因此,迁移学习需要较少的训练数据并减少采集时间。
尽管有这些 BCI 研究,但残疾人在现实生活中使用 BCI 系统仍然存在严重限制。在这里,我们介绍了我们的 BCI 研究,以克服实际使用的障碍。我们建议使用非侵入性方法以高精度估计手臂运动并补偿预测的方法。此外,该研究还描述了预测用户状态和改变系统模式。还介绍了一项预测多重意图的研究。我们未来的研究将开发一个结合自动预测校正、模式改变和多意图预测的实时多功能脑机接口系统。我们认为,自动控制和建议系统对于 BCI 在日常生活中安全有效地使用至关重要。例如,通过指挥目的地实现电动轮椅的自动驾驶将比不断地控制轮椅更加方便和安全。此外,如果 BCI 系统可以像人工智能秘书一样根据情况、日程和时间建议适当的行为,那将很方便。智能BCI可以根据用户的作息时间和时间询问用户是否饿了,根据喜好推荐和点餐,自动喂食。要开发智能 BCI,应结合自动驾驶、上下文识别、机器人技术和人工智能等几种最先进的技术。像人工智能秘书一样的日程安排和时间。智能BCI可以根据用户的作息时间和时间询问用户是否饿了,根据喜好推荐和点餐,自动喂食。要开发智能 BCI,应结合自动驾驶、上下文识别、机器人技术和人工智能等几种最先进的技术。像人工智能秘书一样的日程安排和时间。智能BCI可以根据用户的作息时间和时间询问用户是否饿了,根据喜好推荐和点餐,自动喂食。要开发智能 BCI,应结合自动驾驶、上下文识别、机器人技术和人工智能等几种最先进的技术。
尽管我们提出了一些方法来克服实际使用中的挑战,但在日常生活中使用 BCI 仍然存在许多限制,例如电极连接、系统充电和系统分离的不便。尽管如此,我们希望我们的研究能够成为开发实用的 BCI 系统的基础。
参考文献
1 Salahuddin, U.; Gao, P.X. Signal Generation, Acquisition, and Processing in Brain Machine Interfaces: A Unified Review. Front. Neurosci. 2021, 15, 1174. [Google Scholar] [CrossRef] [PubMed]
2 Dornhege, G. Toward Brain-Computer Interfacing; MIT Press: Cambridge, MA, USA, 2007; pp. 1–25. [Google Scholar]
3 Kandel, E.R.; Koester, J.; Mack, S.; Siegelbaum, S. Principles of Neural Science, 6th ed.; McGraw Hill: New York, NY, USA, 2021; pp. 337–355. [Google Scholar]
4 Yeom, H.G.; Kim, J.S.; Chung, C.K. Estimation of the velocity and trajectory of three-dimensional reaching movements from non-invasive magnetoencephalography signals. J. Neural Eng. 2013, 10, 26006. [Google Scholar] [CrossRef] [PubMed]
5 Stieger, J.R.; Engel, S.A.; Suma, D.; He, B. Benefits of deep learning classification of continuous noninvasive brain-computer interface control. J. Neural Eng. 2021, 18, 046082. [Google Scholar] [CrossRef]
6 Tidare, J.; Leon, M.; Astrand, E. Time-resolved estimation of strength of motor imagery representation by multivariate EEG decoding. J. Neural Eng. 2021, 18, 016026. [Google Scholar] [CrossRef] [PubMed]
7 Jiang, X.Y.; Lopez, E.; Stieger, J.R.; Greco, C.M.; He, B. Effects of Long-Term Meditation Practices on Sensorimotor Rhythm-Based Brain-Computer Interface Learning. Front. Neurosci. 2021, 14, 1443. [Google Scholar] [CrossRef] [PubMed]
8 Park, S.; Ha, J.; Kim, D.H.; Kim, L. Improving Motor Imagery-Based Brain-Computer Interface Performance Based on Sensory Stimulation Training: An Approach Focused on Poorly Performing Users. Front. Neurosci. 2021, 15, 1526. [Google Scholar] [CrossRef] [PubMed]
9 Gao, P.; Huang, Y.H.; He, F.; Qi, H.Z. Improve P300-speller performance by online tuning stimulus onset asynchrony (SOA). J. Neural Eng. 2021, 18, 056067. [Google Scholar] [CrossRef] [PubMed]
10 Xiao, X.L.; Xu, M.P.; Han, J.; Yin, E.W.; Liu, S.; Zhang, X.; Jung, T.P.; Ming, D. Enhancement for P300-speller classification using multi-window discriminative canonical pattern matching. J. Neural Eng. 2021, 18, 046079. [Google Scholar] [CrossRef]
11 Kirasirova, L.; Bulanov, V.; Ossadtchi, A.; Kolsanov, A.; Pyatin, V.; Lebedev, M. A P300 Brain-Computer Interface With a Reduced Visual Field. Front. Neurosci. 2020, 14, 1246. [Google Scholar] [CrossRef]
12 Chen, Y.H.; Yang, C.; Ye, X.C.; Chen, X.G.; Wang, Y.J.; Gao, X.R. Implementing a calibration-free SSVEP-based BCI system with 160 targets. J. Neural Eng. 2021, 18, 046094. [Google Scholar] [CrossRef]
13 Ming, G.G.; Pei, W.H.; Chen, H.D.; Gao, X.R.; Wang, Y.J. Optimizing spatial properties of a new checkerboard-like visual stimulus for user-friendly SSVEP-based BCIs. J. Neural Eng. 2021, 18, 056046. [Google Scholar] [CrossRef] [PubMed]
14 Rashid, M.; Sulaiman, N.; Majeed, A.P.P.A.; Musa, R.M.; Ab Nasir, A.F.; Bari, B.S.; Khatun, S. Current Status, Challenges, and Possible Solutions of EEG-Based Brain-Computer Interface: A Comprehensive Review. Front. Neurorobotics 2020, 14, 25. [Google Scholar] [CrossRef] [PubMed]
15 Rezeika, A.; Benda, M.; Stawicki, P.; Gembler, F.; Saboor, A.; Volosyak, I. Brain-Computer Interface Spellers: A Review. Brain Sci. 2018, 8, 57. [Google Scholar] [CrossRef] [PubMed]
16 Georgopoulos, A.P.; Kalaska, J.F.; Caminiti, R.; Massey, J.T. On the relations between the direction of two-dimensional arm movements and cell discharge in primate motor cortex. J. Neurosci. 1982, 2, 1527–1537. [Google Scholar] [CrossRef] [PubMed]
17 Georgopoulos, A.P.; Kettner, R.E.; Schwartz, A.B. Primate motor cortex and free arm movements to visual targets in three-dimensional space. II. Coding of the direction of movement by a neuronal population. J. Neurosci. 1988, 8, 2928–2937. [Google Scholar] [CrossRef] [PubMed]
18 Velliste, M.; Perel, S.; Spalding, M.C.; Whitford, A.S.; Schwartz, A.B. Cortical control of a prosthetic arm for self-feeding. Nature 2008, 453, 1098–1101. [Google Scholar] [CrossRef]
19 Hochberg, L.R.; Bacher, D.; Jarosiewicz, B.; Masse, N.Y.; Simeral, J.D.; Vogel, J.; Haddadin, S.; Liu, J.; Cash, S.S.; van der Smagt, P.; et al. Reach and grasp by people with tetraplegia using a neurally controlled robotic arm. Nature 2012, 485, 372–375. [Google Scholar] [CrossRef]
20 Collinger, J.L.; Wodlinger, B.; Downey, J.E.; Wang, W.; Tyler-Kabara, E.C.; Weber, D.J.; McMorland, A.J.; Velliste, M.; Boninger, M.L.; Schwartz, A.B. High-performance neuroprosthetic control by an individual with tetraplegia. Lancet 2013, 381, 557–564. [Google Scholar] [CrossRef]
21 Polikov, V.S.; Tresco, P.A.; Reichert, W.M. Response of brain tissue to chronically implanted neural electrodes. J. Neurosci. Methods 2005, 148, 1–18. [Google Scholar] [CrossRef]
22 Bradberry, T.J.; Gentili, R.J.; Contreras-Vidal, J.L. Reconstructing Three-Dimensional Hand Movements from Noninvasive Electroencephalographic Signals. J. Neurosci. 2010, 30, 3432–3437. [Google Scholar] [CrossRef]
23 Yeom, H.G.; Kim, J.S.; Chung, C.K. LSTM Improves Accuracy of Reaching Trajectory Prediction From Magnetoencephalography Signals. IEEE Access 2020, 8, 20146–20150. [Google Scholar] [CrossRef]
24 Yeom, H.G.; Kim, J.S.; Chung, C.K. High-Accuracy Brain-Machine Interfaces Using Feedback Information. PLoS ONE 2014, 9, e103539. [Google Scholar] [CrossRef] [PubMed]
25 Shanechi, M.M.; Williams, Z.M.; Wornell, G.W.; Hu, R.C.; Powers, M.; Brown, E.N. A Real-Time Brain-Machine Interface Combining Motor Target and Trajectory Intent Using an Optimal Feedback Control Design. PLoS ONE 2013, 8, e59049. [Google Scholar] [CrossRef]
26 Gilja, V.; Nuyujukian, P.; Chestek, C.A.; Cunningham, J.P.; Yu, B.M.; Fan, J.M.; Churchland, M.M.; Kaufman, M.T.; Kao, J.C.; Ryu, S.I.; et al. A high-performance neural prosthesis enabled by control algorithm design. Nat. Neurosci. 2012, 15, 1752–1757. [Google Scholar] [CrossRef] [PubMed]
27 Velliste, M.; Kennedy, S.D.; Schwartz, A.B.; Whitford, A.S.; Sohn, J.W.; McMorland, A.J.C. Motor Cortical Correlates of Arm Resting in the Context of a Reaching Task and Implications for Prosthetic Control. J. Neurosci. 2014, 34, 6011–6022. [Google Scholar] [CrossRef]
28 Park, S.M.; Yeom, H.G.; Sim, K.B. User State Classification Based on Functional Brain Connectivity Using a Convolutional Neural Network. Electronics 2021, 10, 1158. [Google Scholar] [CrossRef]
29 Choi, W.-S.; Yeom, H.G. A Brain-Computer Interface Predicting Multi-intention Using An Artificial Neural Network. J. Korean Inst. Intell. Syst. 2021, 31, 206–212. [Google Scholar] [CrossRef]
30 Mattioli, F.; Porcaro, C.; Baldassarre, G. A 1D CNN for high accuracy classification and transfer learning in motor imagery EEG-based brain-computer interface. J. Neural Eng. 2021, 18, 066053. [Google Scholar] [CrossRef]
31 Yang, L.; Song, Y.H.; Ma, K.; Su, E.Z.; Xie, L.H. A novel motor imagery EEG decoding method based on feature separation. J. Neural Eng. 2021, 18, 036022. [Google Scholar] [CrossRef]
32 Fumanal-Idocin, J.; Wang, Y.K.; Lin, C.T.; Fernandez, J.; Sanz, J.A.; Bustince, H. Motor-Imagery-Based Brain-Computer Interface Using Signal Derivation and Aggregation Functions. IEEE Trans. Cybern. 2021, 1, 1–12. [Google Scholar] [CrossRef]
33 Ko, L.W.; Sankar, D.S.V.; Huang, Y.F.; Lu, Y.C.; Shaw, S.; Jung, T.P. SSVEP-assisted RSVP brain-computer interface paradigm for multi-target classification. J. Neural Eng. 2021, 18, 016021. [Google Scholar] [CrossRef] [PubMed]
34 Chen, Y.H.; Yang, C.; Chen, X.G.; Wang, Y.J.; Gao, X.R. A novel training-free recognition method for SSVEP-based BCIs using dynamic window strategy. J. Neural Eng. 2021, 18, 036007. [Google Scholar] [CrossRef] [PubMed]
35 Chen, X.G.; Wang, Y.J.; Nakanishi, M.; Gao, X.R.; Jung, T.P.; Gao, S.K. High-speed spelling with a noninvasive brain-computer interface. Proc. Natl. Acad. Sci. USA 2015, 112, E6058–E6067. [Google Scholar] [CrossRef]
36 Chen, X.G.; Wang, Y.J.; Gao, S.K.; Jung, T.P.; Gao, X.R. Filter bank canonical correlation analysis for implementing a high-speed SSVEP-based brain-computer interface. J. Neural Eng. 2015, 12, 046008. [Google Scholar] [CrossRef]
37 Mannan, M.M.N.; Kamran, M.A.; Kang, S.; Choi, H.S.; Jeong, M.Y. A Hybrid Speller Design Using Eye Tracking and SSVEP Brain-Computer Interface. Sensors 2020, 20, 891. [Google Scholar] [CrossRef] [PubMed]
38 Yao, Z.L.; Ma, X.Y.; Wang, Y.J.; Zhang, X.; Liu, M.; Pei, W.H.; Chen, H.D. High-Speed Spelling in Virtual Reality with Sequential Hybrid BCIs. IEICE Trans. Inf. Syst. 2018, E101d, 2859–2862. [Google Scholar] [CrossRef]
39 Ko, W.; Jeon, E.; Jeong, S.; Phyo, J.; Suk, H.I. A Survey on Deep Learning-Based Short/Zero-Calibration Approaches for EEG-Based Brain-Computer Interfaces. Front. Hum. Neurosci. 2021, 15, 258. [Google Scholar] [CrossRef] [PubMed]
40 Zhang, Z.J.; Sun, J.S.; Chen, T. A new dynamically convergent differential neural network for brain signal recognition. Biomed. Signal Processing Control 2022, 71, 103130. [Google Scholar] [CrossRef]
41 Roy, A.M. An efficient multi-scale CNN model with intrinsic feature integration for motor imagery EEG subject classification in brain-machine interfaces. Biomed. Signal Processing Control 2022, 74, 103496. [Google Scholar] [CrossRef]
42 Yeom, H.G.; Jeong, H. F-Value Time-Frequency Analysis: Between-Within Variance Analysis. Front. Neurosci. 2021, 15, 729449. [Google Scholar] [CrossRef]
43 Li, M.L.; He, D.N.; Li, C.; Qi, S.L. Brain-Computer Interface Speller Based on Steady-State Visual Evoked Potential: A Review Focusing on the Stimulus Paradigm and Performance. Brain Sci. 2021, 11, 450. [Google Scholar] [CrossRef]
44 Nakanishi, M.; Wang, Y.J.; Wang, Y.T.; Mitsukura, Y.; Jung, T.P. A High-Speed Brain Speller Using Steady-State Visual Evoked Potentials. Int. J. Neural Syst. 2014, 24, 1450019. [Google Scholar] [CrossRef] [PubMed]
45 Schirrmeister, R.T.; Springenberg, J.T.; Fiederer, L.D.J.; Glasstetter, M.; Eggensperger, K.; Tangermann, M.; Hutter, F.; Burgard, W.; Ball, T. Deep Learning With Convolutional Neural Networks for EEG Decoding and Visualization. Hum. Brain Mapp. 2017, 38, 5391–5420. [Google Scholar] [CrossRef] [PubMed]
46 Freer, D.; Yang, G.Z. Data augmentation for self-paced motor imagery classification with C-LSTM. J. Neural Eng. 2020, 17, 016041. [Google Scholar] [CrossRef] [PubMed]
47 Dai, G.H.; Zhou, J.; Huang, J.H.; Wang, N. HS-CNN: A CNN with hybrid convolution scale for EEG motor imagery classification. J. Neural Eng. 2020, 17, 016025. [Google Scholar] [CrossRef]
48 Fahimi, F.; Dosen, S.; Ang, K.K.; Mrachacz-Kersting, N.; Guan, C.T. Generative Adversarial Networks-Based Data Augmentation for Brain-Computer Interface. IEEE Trans. Neural Networks Learn. Syst. 2021, 32, 4039–4051. [Google Scholar] [CrossRef]
49 Zhang, K.; Xu, G.H.; Han, Z.Z.; Ma, K.Q.; Zheng, X.W.; Chen, L.T.; Duan, N.; Zhang, S.C. Data Augmentation for Motor Imagery Signal Classification Based on a Hybrid Neural Network. Sensors 2020, 20, 4485. [Google Scholar] [CrossRef]
50 Zhang, R.L.; Zong, Q.; Dou, L.Q.; Zhao, X.Y.; Tang, Y.F.; Li, Z.Y. Hybrid deep neural network using transfer learning for EEG motor imagery decoding. Biomed. Signal Processing Control 2021, 63, 102144. [Google Scholar] [CrossRef]
51 Raghu, S.; Sriraam, N.; Temel, Y.; Rao, S.V.; Kubben, P.L. EEG based multi-class seizure type classification using convolutional neural network and transfer learning. Neural Netw. 2020, 124, 202–212. [Google Scholar] [CrossRef]
