【泡泡一分钟】基于因子图的视觉-惯导-运动腿状态估计方法
每天一分钟,带你读遍机器人顶级会议文章
标题:Hybrid Contact Preintegration for Visual-Inertial-Contact StateEstimation Using Factor Graphs
作者:Ross Hartley, Maani Ghaffari Jadidi, Lu Gan, Jiunn-Kai Huang, Jessy W. Grizzle, and Ryan M. Eustice
来源:IROS 2018
编译:颜青松
审核:陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在机器人状态估计中,因子图框架是一个非常方便的技术,其中节点表示状态,因子表示观测值。当为腿式机器人设计一个传感器融合框架时,通常需要使用视觉、惯导、联合编码器和接触式传感器;其中视觉-惯导里程计(VIO)已经得到了深入的研究,但是针对腿式机器人的预积分接触因子直到最近才被提出。这使得能够整合联合编码器和接触传感器的观测值到因子图中,但是每次观测都需要向图中添加节点。
为解决接触帧的转换问题,本文提出了一个混合接触预积分理论,从而使得能够集成任意数量转换的接触传感器信息。本文方法的核心在于减少了非线性优化中的变量,只对相机或关键帧的状态进行估计。
本文的方法使用了一个Cassie系列的机器人进行实验,并用了一个运动捕捉系统来采集轨迹的真实值。实验结果证明本文提出的方法能够提高状态估计的精度,并提高整个系统的鲁棒性,当然除此之外本文的算法也促进了腿式机器人的发展。
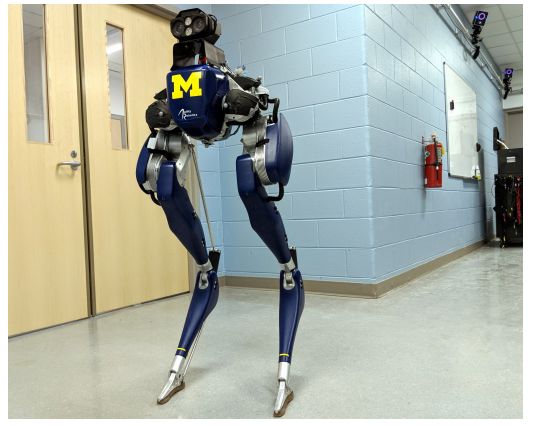
图1 本文使用机器人,其是由Agility Robotics生产的Cassie-Series双足机器人,其具有20个自由度、10个执行器、联合编码器、IMU和一个S7双目相机。
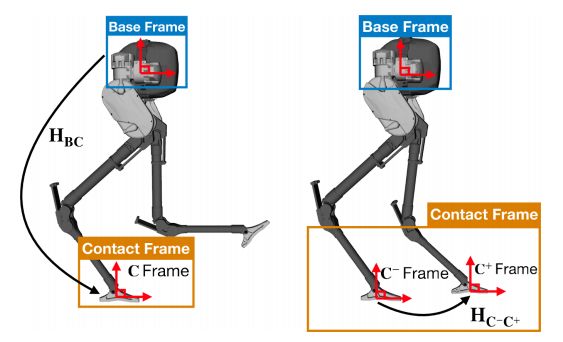
图2 上图展示了双足机器人上如何计算两个接触帧之间的转换关系的方法,即以基础帧为基础,然后计算两个接触帧间的单应矩阵。

Abstract
The factor graph framework is a convenientmodeling technique for robotic state estimation where statesare represented as nodes, and measurements are modeledas factors. When designing a sensor fusion framework forlegged robots, one often has access to visual, inertial, jointencoder, and contact sensors. While visual-inertial odometryhas been studied extensively in this framework, the addition ofa preintegrated contact factor for legged robots has been onlyrecently proposed. This allowed for integration of encoder andcontact measurements into existing factor graphs, however, newnodes had to be added to the graph every time contact was madeor broken. In this work, to cope with the problem of switchingcontact frames, we propose a hybrid contact preintegrationtheory that allows contact information to be integrated throughan arbitrary number of contact switches. The proposed hybridmodeling approach reduces the number of required variablesin the nonlinear optimization problem by only requiring newstates to be added alongside camera or selected keyframes. Thismethod is evaluated using real experimental data collected froma Cassie-series robot where the trajectory of the robot producedby a motion capture system is used as a proxy for groundtruth. The evaluation shows that inclusion of the proposedpreintegrated hybrid contact factor alongside visual-inertialnavigation systems improves estimation accuracy as well asrobustness to vision failure, while its generalization makes itmore accessible for legged platforms.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


