【泡泡一分钟】通过折射平面从运动恢复结构
每天一分钟,带你读遍机器人顶级会议文章
标题:Refractive Structure-from-Motion Through a Flat Refractive Interface
作者:Francois Chadebecq, Francisco Vasconcelos, George Dwyer, Rene Lacher, Sebastien Ourselin, Tom Vercauteren, Danail Stoyanov
来源:International Conference on Computer Vision (ICCV 2017)
编译:张鲁
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

使用水下影像来恢复3D场景的几何结构会涉及带折射的从运动恢复结构(RSfM)问题,即光线在传播介质表面的折射会引起畸变从而违反了单视点假设。在RSfM问题中直接使用针孔相机模型会导致不精确的相机位姿估计以及漂移。
RSfM方法已经针对厚玻璃界面的情况进行了详尽的研究,该界面假设摄像机和观察场景之间具有两个折射界面。此外,相机镜头与水直接接触时,则仅存在一个折射界面。通过显式地考虑一个折射界面,我们以轴向相机的广义对极约束的形式开发了一种对折射基础矩阵的简洁推导方法。我们使用折射基础矩阵来优化由针孔相机假设获得的初始位姿估计。这个策略使得我们可以鲁棒地在水下估计相机位姿,而不像其他方法具有较差的噪声敏感性。我们同时还构建了一个新式的四视图约束来使得视频中的相机位姿具有一致性,从而构建了一个新的RSfM架构。
我们通过合成数据对本文方法的数值特性进行了验证,我们还提供了在真实数据上的实验结果来证明在实验室环境中和内窥镜检查中的应用性能。
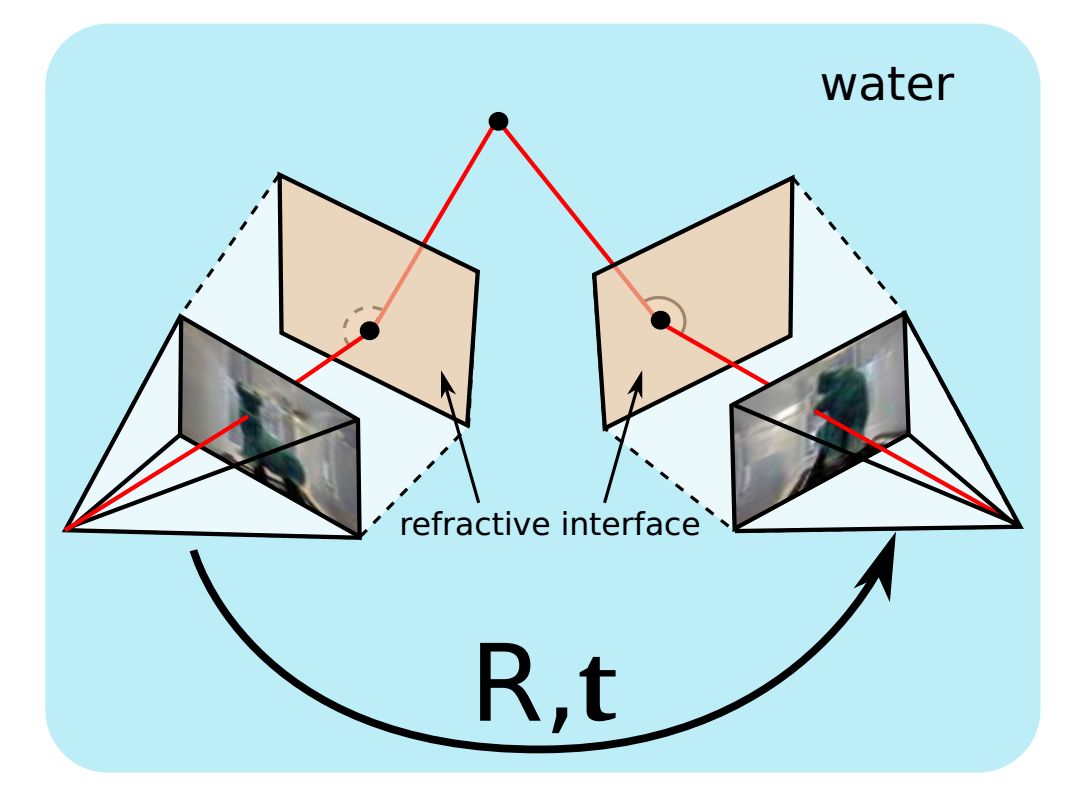
图1. 假设薄折射平面的水下图像的有折射从运动恢复结构
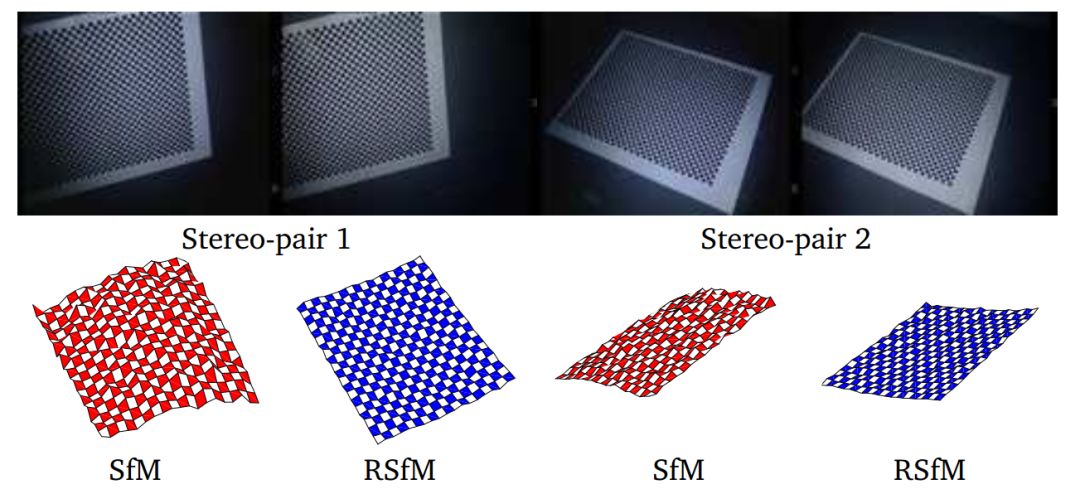
图9. 使用立体视觉内窥镜对棋盘格进行水下3D重建。RSfM显著地提升了由SfM估计出的3D形状。

Abstract
Recovering 3D scene geometry from underwater images involves the Refractive Structure-from-Motion (RSfM) problem, where the image distortions caused by light refraction at the interface between different propagation media invalidates the single view point assumption. Direct use of the pinhole camera model in RSfM leads to inaccurate camera pose estimation and consequently drift. RSfM methods have been thoroughly studied for the case of a thick glass interface that assumes two refractive interfaces between the camera and the viewed scene. On the other hand, when the camera lens is in direct contact with the water, there is only one refractive interface. By explicitly considering a refractive interface, we develop a succinct derivation of the refractive fundamental matrix in the form of the generalised epipolar constraint for an axial camera. We use the refractive fundamental matrix to refine initial pose estimates obtained by assuming the pinhole model. This strategy allows us to robustly estimate underwater camera poses, where other methods suffer from poor noise-sensitivity. We also formulate a new four view constraint enforcing camera pose consistency along a video which leads us to a novel RSfM framework. For validation we use synthetic data to show the numerical properties of our method and we provide results on real data to demonstrate performance within laboratory settings and for applications in endoscopy.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com

