【泡泡一分钟】通信和隐私限制下分布式轨迹估计(ICRA-30)
每天一分钟,带你读遍机器人顶级会议文章
标题:Distributed trajectory estimation with privacy and communication constraints: A two-stage distributed Gauss-Seidel approach
作者:Siddharth Choudhary Luca Carlone Carlos Nieto
来源:ICRA 2016 (International Conference on Robotics and Automation )
播音员:王肃
编译:刘彤宇
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天为大家带来的文章是——通信和隐私限制下分布式轨迹估计:一个二阶分布式高斯-赛尔德算法,该文章选自ICRA2016。
我们提出了一个分布式算法来估计相关位姿测量时多机器人协作的三维轨迹。 我们的方法利用最近的一项结果[1]——通过一个序列中的两个二次规划子问题很好地近似最大似然轨迹。 目前主要的工作成果是利用分布式高斯 - 赛德尔(DGS)算法解决这些子问题。 我们的方法有几个优点:它只需要最低限度的信息交换。这在交流和隐私受限制的情况下很有优势;它具有即时的特点:在几次迭代之后,轨迹估计已经是准确的,并且它们逐渐趋于集中估计。 DGS方法可以很好地适应大型团队,并且操作简单。 我们在模拟和现场测试中试验了这种方法,证明了相对于其它技术所具有的优点。
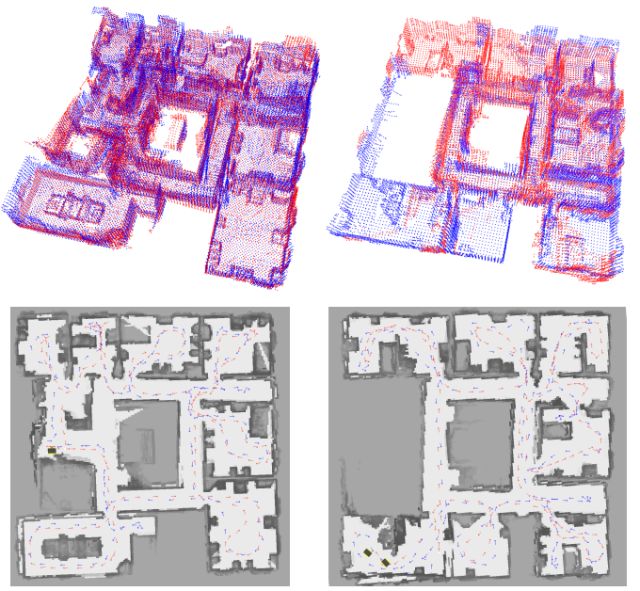
图一 实验效果图
在本文的现场实验中,分布式轨迹估计算法可以通过两种机器人(红,蓝)对整个建筑物进行3D重建。上面图形显示的是一个楼层的重建点云,并将估计的轨迹叠加在一个占用栅格图上(下面)。
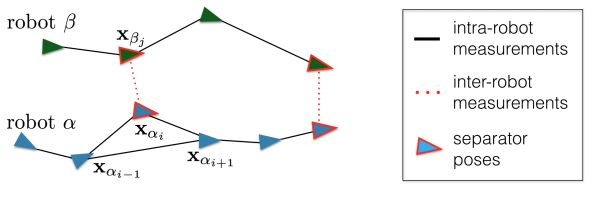
图二 算法原理图
作者给出了一个双机器人协作轨迹估计的实例:两个机器人(α蓝色,深绿色β)穿过未知的环境,机器人收集各自的探测信息(黑色实线)。作者定义为intra-robot measurements,包括里程计测量结果,回环检测等。而在交互点时,机器人可以观测到相互之间的位置信息(红色虚线),比如xαi,xβj 。(在这里作者使用一个专业术语separators,定义在机器人间测量得到的位姿信息)。目的是通过两个机器人计算其轨迹的最大似然(ML)估计。
Abstract
We propose a distributed algorithm to estimate the 3D trajectories of multiple cooperative robots from relative pose measurements. Our approach leverages recent results [1] which show that the maximum likelihood trajectory is well approximated by a sequence of two quadratic subproblems. The main contribution of the present work is to show that these subproblems can be solved in a distributed manner, using the distributed Gauss-Seidel (DGS) algorithm. Our approach has several advantages. It requires minimal information exchange, which is beneficial in presence of communication and privacy constraints. It has an anytime flavor: after few iterations the trajectory estimates are already accurate, and they asymptotically convergence to the centralized estimate. The DGS approach scales well to large teams, and it has a straightforward implementation. We test the approach in simulations and field tests, demonstrating its advantages over related techniques.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



