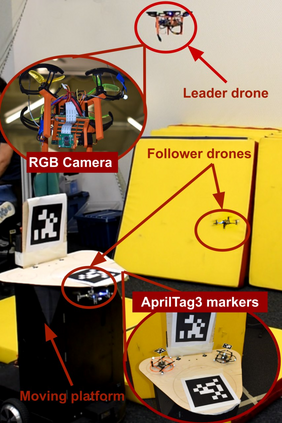
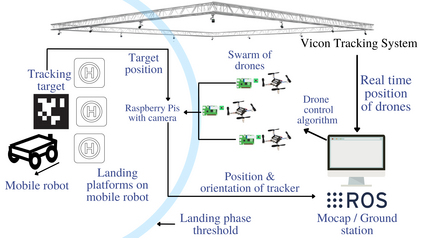
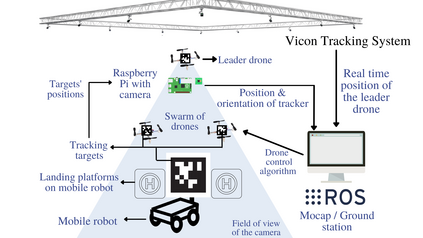
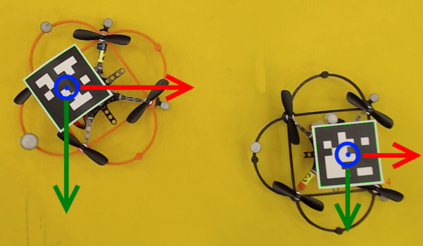
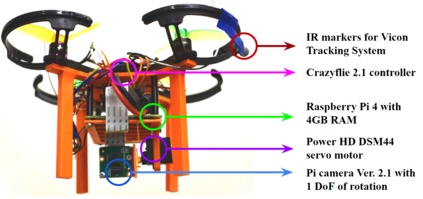
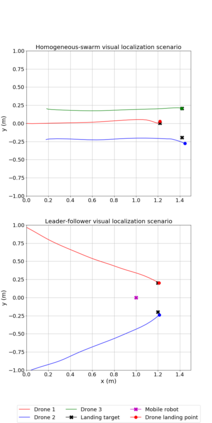
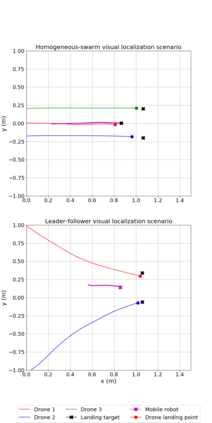
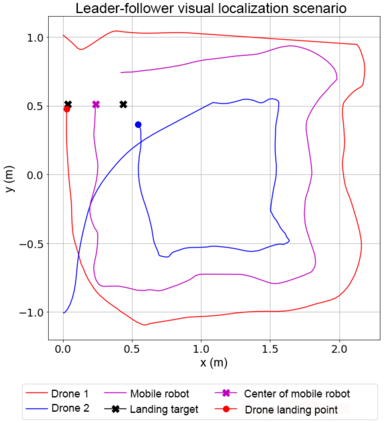
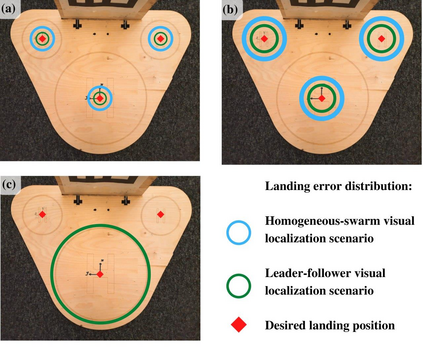
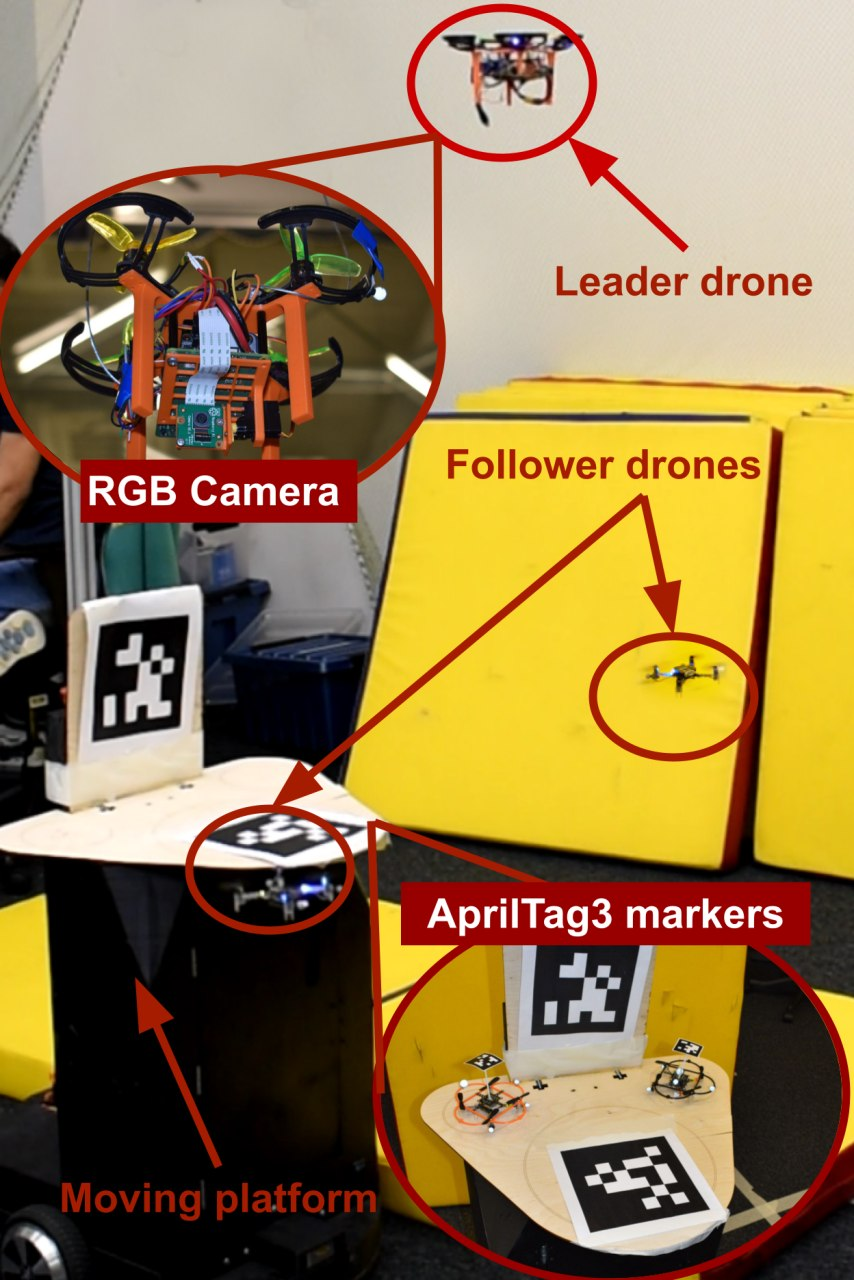
Heterogeneous teams of mobile robots and UAVs are offering a substantial benefit in an autonomous exploration of the environment. Nevertheless, although joint exploration scenarios for such systems are widely discussed, they are still suffering from low adaptability to changes in external conditions and faults of swarm agents during the UAV docking. We propose a novel vision-based drone swarm docking system for robust landing on a moving platform when one of the agents lost its position signal. The proposed SwarmHawk system relies on vision-based detection for the mobile platform tracking and navigation of its agents. Each drone of the swarm carries an RGB camera and AprilTag3 QR-code marker on board. SwarmHawk can switch between two modes of operation, acting as a homogeneous swarm in case of global UAV localization or assigning leader drones to navigate its neighbors in case of a camera fault in one of the drones or global localization failure. Two experiments were performed to evaluate SwarmHawk's performance under the global and local localization with static and moving platforms. The experimental results revealed a sufficient accuracy in the swarm landing task on a static mobile platform (error of 4.2 cm in homogeneous formation and 1.9 cm in leader-follower formation) and on moving platform (error of 6.9 cm in homogeneous formation and 4.7 cm in leader-follower formation). Moreover, the drones showed a good landing on a platform moving along a complex trajectory (average error of 19.4 cm) in leader-follower formation. The proposed SwarmHawk technology can be potentially applied in various swarm scenarios, including complex environment exploration, inspection, and drone delivery.
翻译:移动机器人和无人驾驶航空器的超异体小组在自主探索环境方面正在提供大量好处。然而,尽管对这些系统的联合探索设想方案进行了广泛讨论,但它们仍然在对无人驾驶航空器对接期间,对外部条件的变化和群温剂的缺陷适应性较低。我们提议建立一个新型的基于愿景的无人驾驶无人机群对流系统,以便在一个代理人失去其定位信号时,在一个代理人失去其定位信号时,在移动平台上进行强力着陆。拟议的SwarmHawk系统依赖于对移动平台跟踪和导航的基于愿景的探测。每架无人驾驶飞机都携带RGB相机和AprayTag3 QR码标记。SwarmHawk可以在两种操作模式之间发生转变。我们提议,如果全球无人驾驶飞行器或全球本地化失败时出现摄像头故障,则将无人驾驶无人驾驶无人驾驶飞机在移动平台上进行强力着陆。 使用固定和移动平台来评估SwarmHawk在全球和地方平台下Syralalallifor性平台的运行情况。 实验结果显示,在Swarmal-hoal-heflifor Stow Stem Stem Stem Stem Stem 平台上,在Sloder Stabider Stabider Stem Stem 和Sloder Stabider 平台上,在Sloder Stower lader Stem Stem Stem Stem 平台上,在Sloder Stem Stower 平台上,在Slder-st-st-stl-st-st Stowluputilmlmlmlml ladl ladld