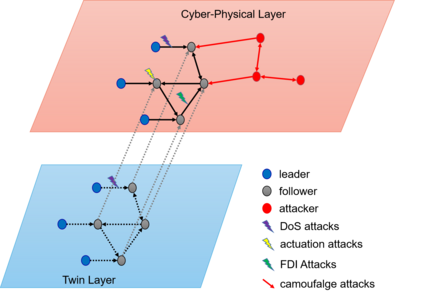
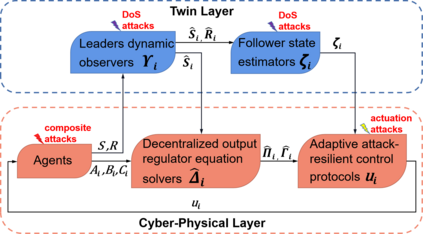
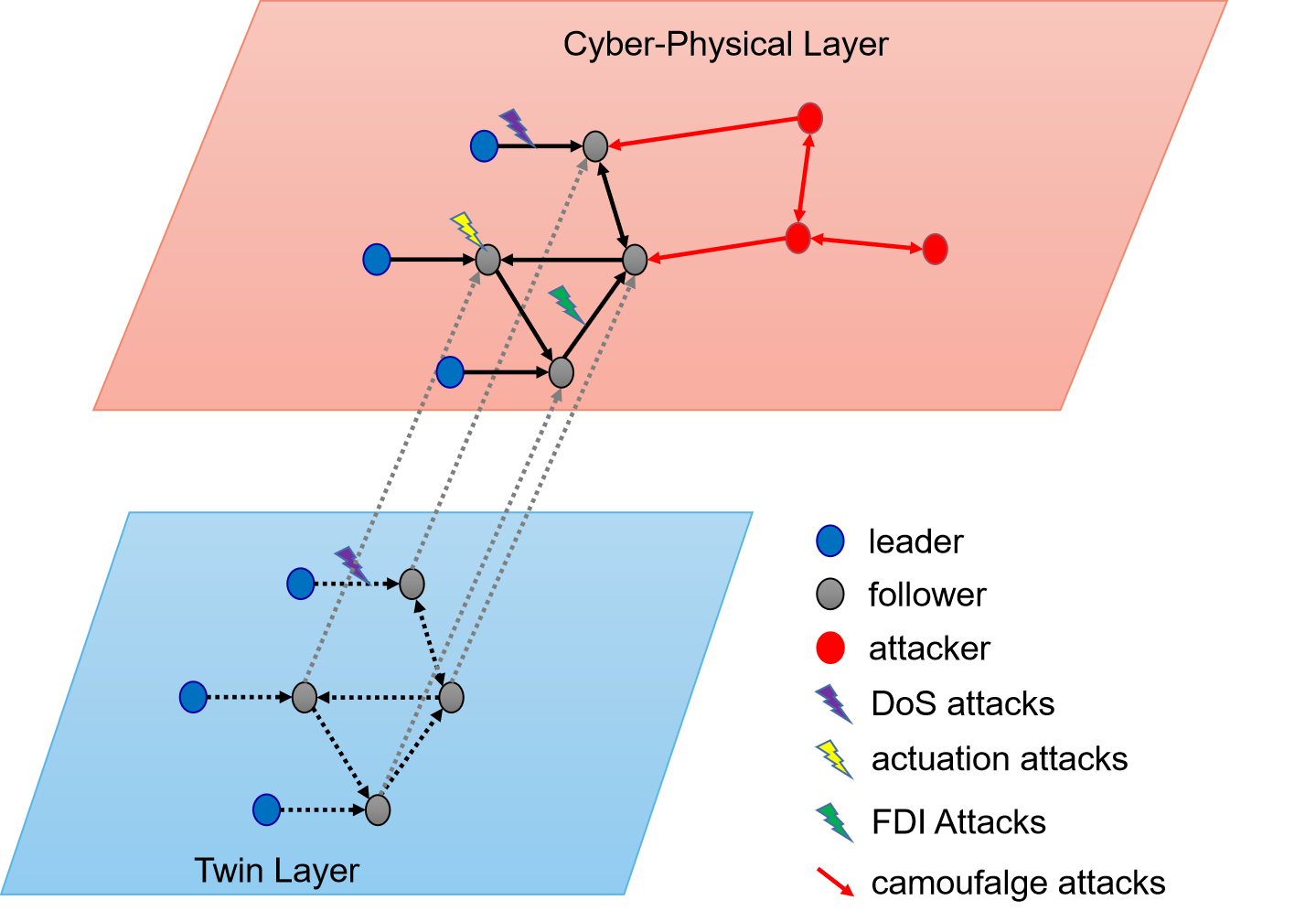
This paper studies the distributed resilient output containment control of heterogeneous multiagent systems against composite attacks, including denial-of-services (DoS) attacks, false-data injection (FDI) attacks, camouflage attacks, and actuation attacks. Inspired by digital twins, a twin layer (TL) with higher security and privacy is used to decouple the above problem into two tasks: defense protocols against DoS attacks on TL and defense protocols against actuation attacks on cyber-physical layer (CPL). First, considering modeling errors of leader dynamics, we introduce distributed observers to reconstruct the leader dynamics for each follower on TL under DoS attacks. Second, distributed estimators are used to estimate follower states according to the reconstructed leader dynamics on the TL. Third, according to the reconstructed leader dynamics, we design decentralized solvers that calculate the output regulator equations on CPL. Fourth, decentralized adaptive attack-resilient control schemes that resist unbounded actuation attacks are provided on CPL. Furthermore, we apply the above control protocols to prove that the followers can achieve uniformly ultimately bounded (UUB) convergence, and the upper bound of the UUB convergence is determined explicitly. Finally, two simulation examples are provided to show the effectiveness of the proposed control protocols.
翻译:本文研究了数字孪生方法下,对抗复合攻击(包括拒绝服务攻击、错误数据注入攻击、伪装攻击和行动攻击)的异构多智能体系统的分布式鲁棒输出约束控制。为了提高安全性和隐私性,我们使用数字孪生中的孪生层(TL)将上述问题分解成两个子问题:TL上的防御协议抵御拒绝服务攻击,以及在物理层上抵御行动攻击的防御协议。首先,考虑到领航者动态模型的建模误差,我们引入分布式观察器,在TL上为每个从从者重构领航者动态模型,以应对拒绝服务攻击。其次,在重构的领航者动态模型的基础上,设计分布式估计器以估计从者的状态。第三,在重构的领航者动态模型的基础上,我们设计了分散求解器,在CPL上计算输出调节器方程。第四,在重构的领航者动态模型的基础上提供了分散的自适应抵御无界行动攻击的控制方案。此外,我们还应用上述控制协议证明了从者可以实现均匀最终有界(UUB)收敛,并且明确确定了UUB收敛的上限。最后,我们提供了两个仿真例子,以展示所提出的控制协议的有效性。