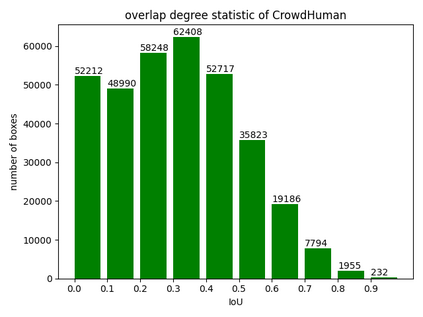
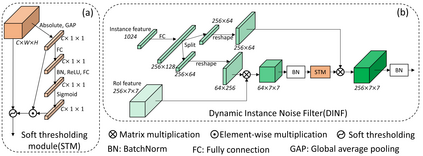
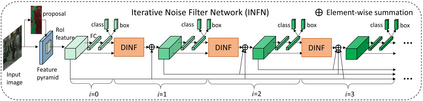
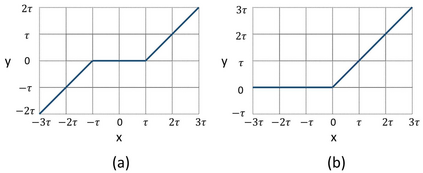
Occlusion issue is the biggest challenge in pedestrian detection. RCNN-based detectors extract instance features by cropping rectangle regions of interest in the feature maps. However, the visible pixels of the occluded objects are limited, making the rectangle instance feature mixed with a lot of instance-irrelevant noise information. Besides, by counting the number of instances with different degrees of overlap of CrowdHuman dataset, we find that the number of severely overlapping objects and the number of slightly overlapping objects are unbalanced, which may exacerbate the challenges posed by occlusion issues. Regarding to the noise issue, from the perspective of denoising, an iterable dynamic instance noise filter (DINF) is proposed for the RCNN-based pedestrian detectors to improve the signal-noise ratio of the instance feature. Simulating the wavelet denoising process, we use the instance feature vector to generate dynamic convolutional kernels to transform the RoIs features to a domain in which the near-zero values represent the noise information. Then, soft thresholding with channel-wise adaptive thresholds is applied to convert the near-zero values to zero to filter out noise information. For the imbalance issue, we propose an IoU-Focal factor (IFF) to modulate the contributions of the well-regressed boxes and the bad-regressed boxes to the loss in the training process, paying more attention to the minority severely overlapping objects. Extensive experiments conducted on CrowdHuman and CityPersons demonstrate that our methods can help RCNN-based pedestrian detectors achieve state-of-the-art performance.
翻译:封隔问题是行人探测的最大挑战。 以 RCNN 为基础的探测器通过对地图感兴趣的矩形区域进行裁剪, 提取实例特征。 但是, 隐蔽物体的可见像素有限, 使矩形实例特征与许多与实例相关的噪音信息混在一起。 此外, 我们通过计算与人群数据集重叠程度不同的事件数量, 发现严重重叠物体的数量和略微重叠对象的数量不平衡, 这可能加剧隐蔽问题带来的挑战。 关于噪音问题, 从调色角度来看, 提议为基于 RCNN 的行人探测器提供可互换的动态实例噪声过滤器( DINF ), 以改善实例特征的信号- 音响率比。 模拟波形变异过程, 我们用实例矢量矢量将RoI 特性转换成一个以近零值表示噪音信息的域。 然后, 将频道调整门槛阈值的临界阈值用于将近零点值的动态动态图像测试器, 将 Rentral- dirio- 测试箱 显示为以更深的准确的内值 。