
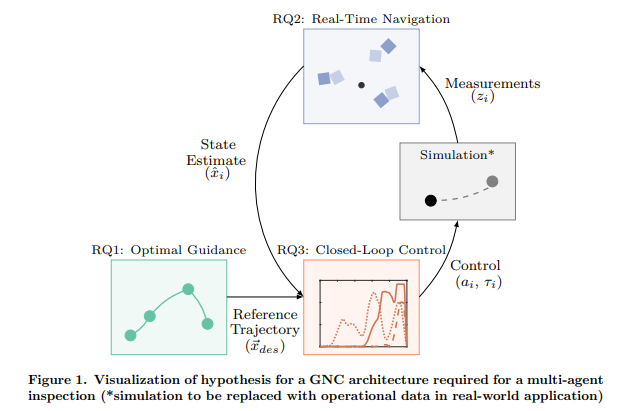
在轨服务是一组快速发展的任务集合,旨在通过加注燃料、更换或升级组件来延长老化遗产空间系统的寿命。若缺乏在轨空间物体(RSO)的先验知识,在轨检查便成为服务前获取未知RSO信息的必要前提。对于检查操作而言,多智能体同步观测可更快绘制RSO图谱,并确保检查完整性不受RSO动力学影响。多智能体制导、导航与控制(GNC)方案需以协作为核心进行设计,以实现检查目标,同时发挥分布式检查系统的独特能力。本研究将GNC系统分为两部分:用于生成平移参考轨迹的离线制导方案,以及用于参考轨迹跟踪与约束姿态控制的在线导航与控制回路。
离线制导方案聚焦于以不同形式表述最优控制问题(OCP),以体现处理多智能体检查任务的潜在方法。这些表述可分为两类:连续控制轨迹与基于节点最小化约束(NMC)的轨迹。这些OCP在成本函数、约束条件、状态变量和控制变量上存在差异,但根本目标均为实现智能体间的协作以完成全面检查。这些OCP的求解通过伪谱配点法转录后采用内点法非线性规划(NLP)求解器完成,或直接表述为静态NLP求解。本文提出一种评估信息增益的新方法,该方法综合视角与光照条件以评估从获取图像中可提取信息的质量。两类表述均证明能在多种任务约束下生成参考轨迹。
在线导航与控制方案提供集中估计各智能体状态的闭环系统,同时跟踪给定参考轨迹并遵循姿态约束。本文探讨两种适用于在线实现的因子图调整方法:首先采用滑动窗口因子图(SWFG)进行协作定位——即仅位置估计;继而基于静态RSO使用佐治亚理工学院平滑建图(GTSAM)工具箱进行全六自由度相对位姿估计,并通过增量平滑建图(iSAM2)算法求解因子图。两种方法均通过引入智能体间距离测量增强传感器数据集,证明对传感器致盲事件具有鲁棒性。参考轨迹跟踪由简易LQR控制器实现。约束姿态控制器需同时维持对检查目标的持续跟踪并避免指向太阳禁止区。为此,采用先前开发的基于回转人工势函数的控制器进行跟踪适配。在线方案被证实能为检查任务提供遵循姿态要求的可靠参考轨迹跟踪方法。通过多个示例场景验证所提离线-在线混合方法及实施策略的有效性。
本文后续章节安排如下:第二章阐述所开发GNC方法涉及的背景知识及相关最新文献;第三章描述用于生成平移参考轨迹的制导系统方法论与中间结果;第四、五章分别针对实时导航与控制系统进行同等阐述;第六章通过多个示例场景整合离线制导与在线导航控制方法,展示集成GNC方法的涌现能力与特性;第七章总结本研究贡献并展望未来工作方向。


