
近年来,随着人工智能(AI)与信息通信技术的进步,陆、空、海领域传统由人类操控的载具正逐步向无人自主载具(UVs)转型。其中,无人海洋载具(UMVs)——涵盖无人水下载具(UUVs)与无人水面载具(USVs)——展现出独特潜力:完成有人载具无法实现的海事任务、降低人力风险、增强军事任务执行效能并创造巨大经济效益。本文旨在梳理UMVs发展的历史与当下趋势,并展望其未来方向。文章探讨UMVs的潜在优势(包括突破有人载具任务限制、减少人员介入风险、提升军事与经济效能),同时指出相较于陆空无人载具,UMVs发展因海洋环境复杂性相对滞后。本综述强调UMV研发面临的核心挑战(尤其在恶劣环境下的运行问题),并指出需持续突破通信组网技术、导航与声学探测技术、多载具任务规划技术以提升UMV协同与智能水平。此外,文章明确整合AI与机器学习技术对增强UMV自主性与复杂任务能力的重要性。总体而言,本文为UMV发展现状与未来路径提供系统性洞见。
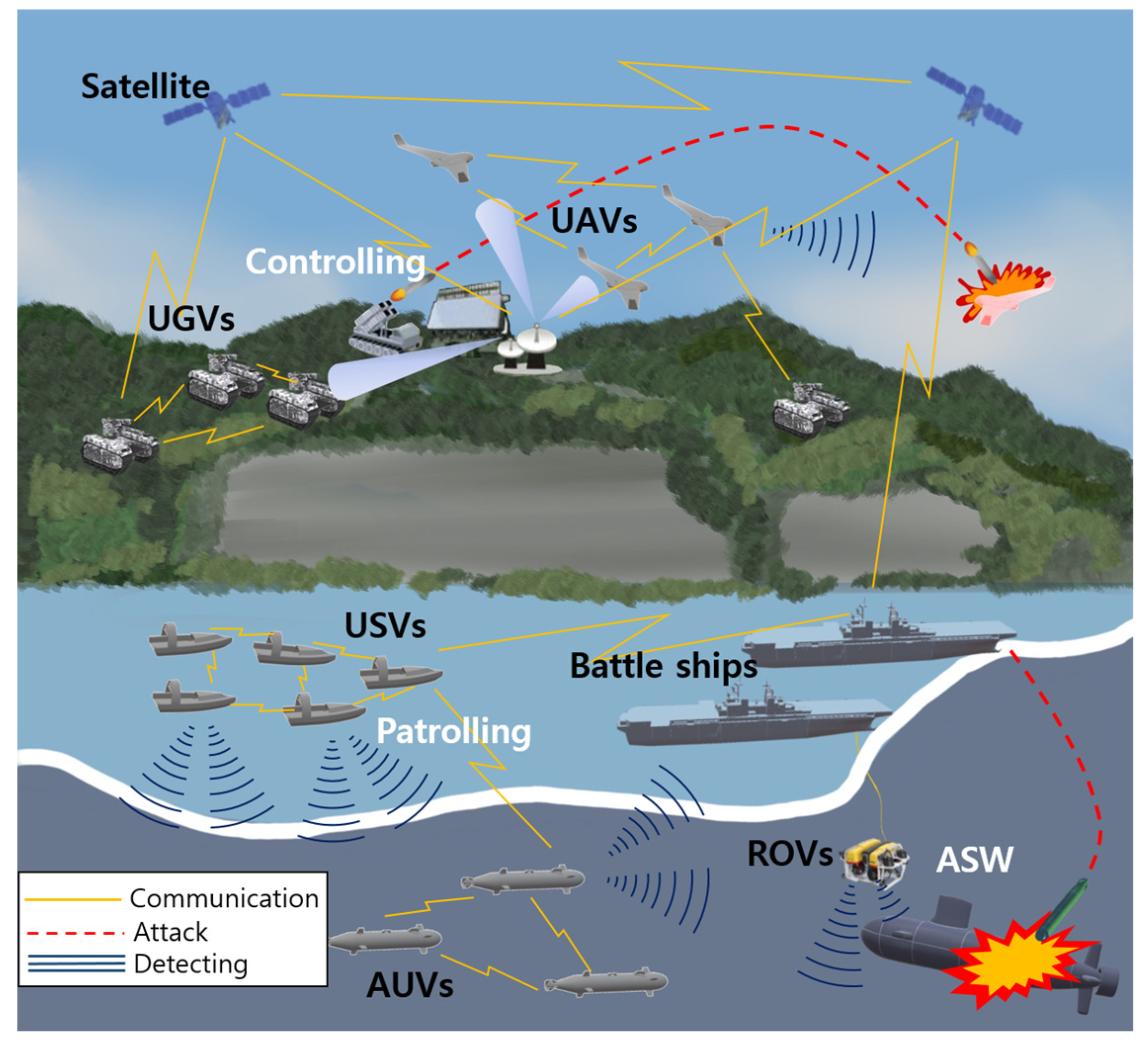
图1所示。未来战场作战的概念。
二战期间,融合先进技术的新型武器大量涌现[1],无人海洋载具(UMV)技术首次应用于烟雾屏行动与水雷清除任务[2],同时用于战斗损伤评估、水质采样与装备回收[3]。参战国均将武器细节列为机密以确保优势,其中水下监视技术直至冷战结束后才解禁,无人载具(UVs)技术自此步入实质性发展阶段。
无人载具可在陆、空、海乃至水下全域运作。通过传感器执行数据采集、分析与验证,实时适应战场环境。一般而言,无人载具无需人员随行即可安全探索人类难以抵达的危险或未开发区域,且具备全天候持续作业能力,相较于有人载具可显著降低设备费用与任务成本。
早期无人载具依赖操作员远程操控,现已发展为具备环境感知与自主决策能力的先进无人地面车辆(UGV)、无人航空载具(UAV)及无人海洋载具(UMV),并可与作战平台及其他无人载具联合作战[4,5]。
无人地面车辆(UGV)最初以爆炸物处置(EOD)、扫雷及情报监视侦察(ISR)为研发目标,现逐步向物资运输与农业领域扩展[6,7]。无人航空载具(UAV)具备远程操控优势,可高效执行危险区域侦察与情报获取任务[8,9],其搭载的摄像头能高速巡逻并实现卓越通信能力[10],应用场景已从军事[11]延伸至物流、航拍、农业与气象观测等民用领域[12,13]。
近年,无人海洋载具(UMV)作为未来海军作战核心要素备受关注,重点覆盖水雷管控、海上安保与封锁任务[11]。UMV包含无人水面艇(USV)与无人水下航行器(UUV)[1],其中UUV分为缆控潜水器(ROV)与全无线自主水下航行器(AUV),可深入人类无法到达的深海区域,借助摄像头与声呐传感器实施勘探,并通过机械臂采集样本[13],广泛应用于海洋科考、水雷侦扫与远程侦察等军民领域。
突破单一平台限制的异构集群监视系统正成为研究热点,该系统通过无人机、无人车、无人艇与无人潜航器的协同作业实现全域监控[5,14-19]。如图1所示,作战空间正从单一平台向陆、海、空、天、电磁及网络的跨环境多平台联合作战模式转型[20]。
多机器人系统旨在克服单体机器人信息处理能力有限与专业化任务执行不足的缺陷[21,22]。自20世纪80年代末概念提出以来,相继发展出蜂窝机器人、集群机器人及分布式机器人等理论。集群无人系统借鉴自然生态的群体智能,使多无人载具通过信息交互实现协同作业,此类技术被称为"群集机器人学"[4,5]。集群无人系统通过数据共享与融合提升环境感知精度,其核心技术包括:近距离避障控制、动态任务实时分配、以及协同信息生成。这一新兴领域通过多机器人协同提升系统弹性与容错性,模仿生物群体运动形成协同效应[21],其核心在于通过最小化邻域通信驱动全局创造性行动[22]。自2000年代"群体机器人"项目启动以来,相关研究已在多领域持续深化。
无人载具协同研究(如无人机-无人车、无人机-无人艇组合)近年来成果丰硕[23-33]。海洋环境中,无人潜航器与无人艇的协同作业可显著提升任务精度,同时降低作业时间与成本[34]。此外,面向无人海洋载具的先进传感器研发趋势明显:传感器趋于轻量化与微型化,例如意法半导体的L3GD20H陀螺仪采用微型MEMS技术,封装尺寸仅3×3×1毫米;小型无人潜航器搭载的声呐传感器(如Ping超声测距传感器等)尺寸普遍小于20×20毫米。
综上所述,无人系统技术正朝着个体智能化与群体协同化方向发展。本研究聚焦无人海洋载具,分析其在反水雷(MCM)、反潜战(ASW)等海洋任务中日渐重要的技术发展趋势与未来方向。
本文参考文献囊括历史基础数据至最新研究成果。鉴于民用技术向国防领域加速转化的现状,除海军相关资料外,同时收录大量民用研究成果。
论文结构如下:第2节探讨无人海洋载具的今昔发展;第3节解析核心传感器技术;第4节评述智能技术研究进展;第5节分析跨领域集群协同应用;第6节与第7节分别进行讨论与总结。
