
主题: Robot Control and Collaboration in Situated Instruction Following
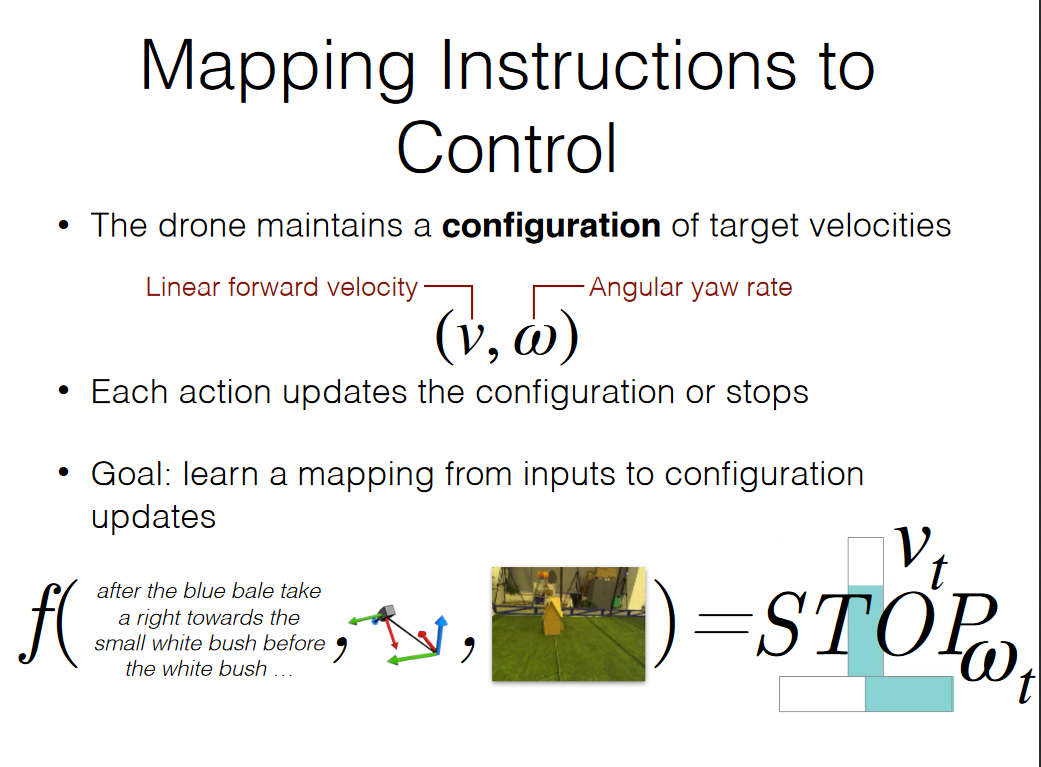
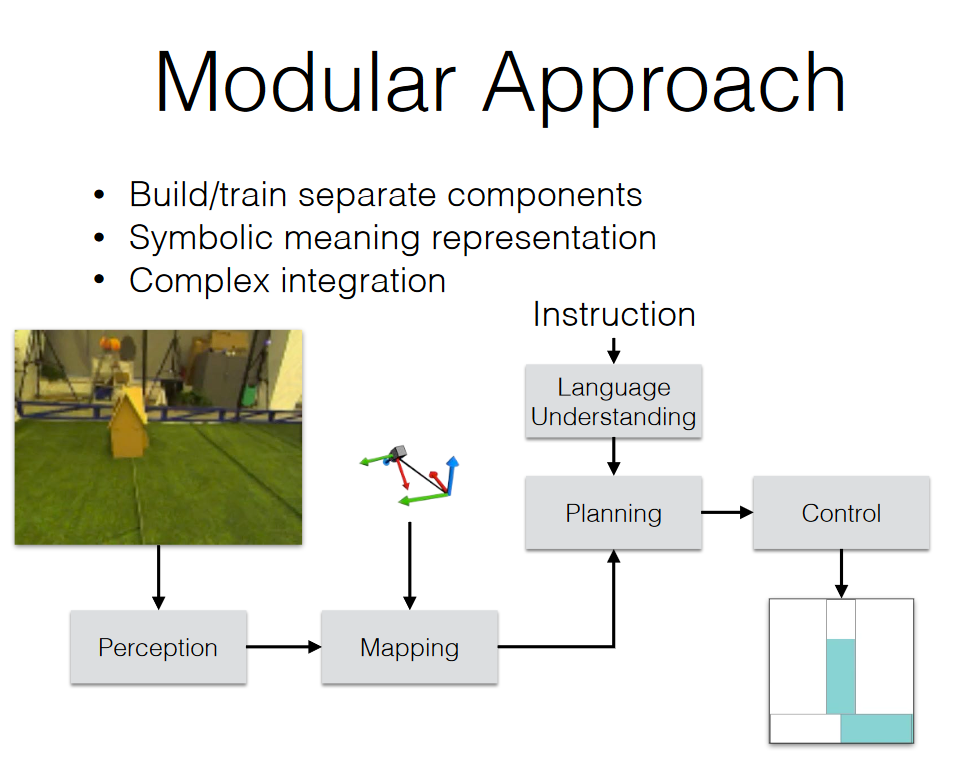
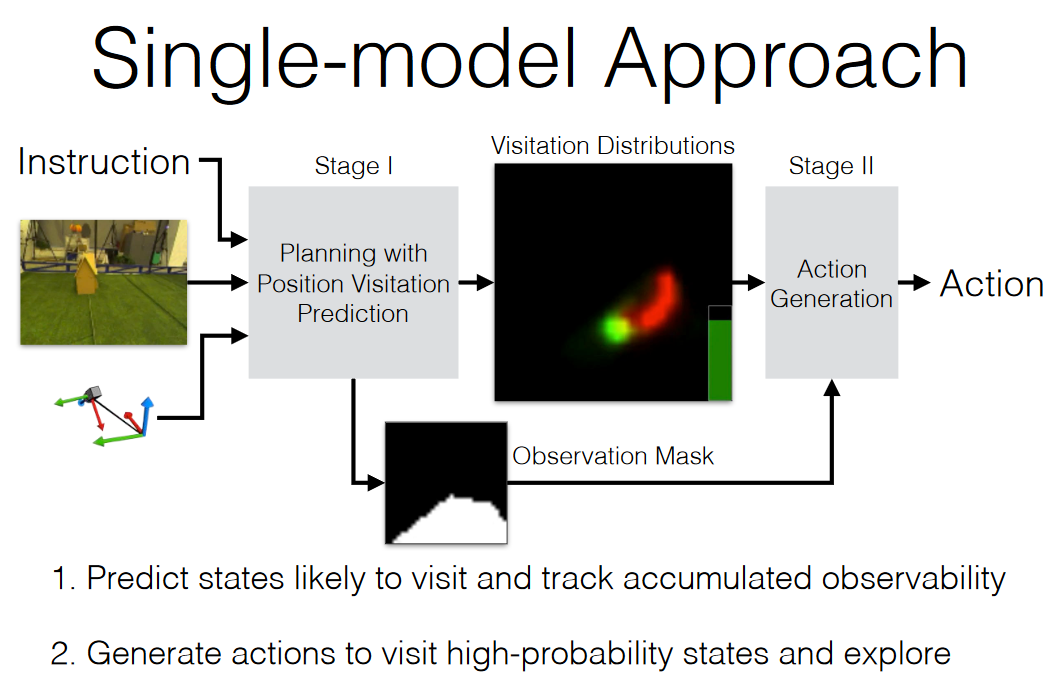
摘要: 将提出两个研究学习遵循自然语言指令问题的项目。我将介绍新的数据集,一类用于教学跟踪的可解释模型,结合监督学习和强化学习优点的学习方法,以及新的评估协议。在第一部分中,我将讨论使用机器人代理执行自然语言指令的任务。与现有的工作相比,我们不设计语言意义或机器人环境的形式表示。相反,我们学习将原始观测和语言直接映射到四架无人机的低级连续控制。在第二部分中,我将提出在协作场景中学习遵循指令序列的任务,在协作场景中,用户和系统都在环境中执行操作,用户使用自然语言控制系统。为了研究这个问题,我们构建了cerelbar,一个多人的3D游戏,在这个游戏中,一个领导者指导一个跟随者,两人一起在环境中完成复杂的目标。这两个项目由Valts Blukis、Alane Suhr和合作者领导。
作者简介: Yoav Artzi是康奈尔大学计算机科学和康奈尔技术系的助理教授。他的研究集中在学习自然语言理解的表达模型上,最近的一项研究是在情境互动情境中进行的。他获得了NSF职业奖,EMNLP 2015、ACL 2017和NAACL 2018的论文奖,以及来自谷歌、Facebook和Workday的教师奖。Yoav拥有特拉维夫大学的学士学位和华盛顿大学的博士学位。个人主页:https://tech.cornell.edu/people/yoav-artzi/
成为VIP会员查看完整内容
相关内容

人工智能(Artificial Intelligence, AI )是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学。 人工智能是计算机科学的一个分支。
专知会员服务
24+阅读 · 2019年11月11日



相关VIP内容
专知会员服务
24+阅读 · 2019年11月11日
相关资讯
相关论文