【泡泡一分钟】 针对平面物体追踪的约束置信度匹配算法
每天一分钟,带你读遍机器人顶级会议文章
标题:Constrained Confidence Matching for Planar Object Tracking
作者:Tao Wang, Haibin Ling, Congyan Lang, Songhe Feng, Yi Jin and Yidong Li
来源:2018 IEEE International Conference on Robotics and Automation (ICRA)
编译:李建禹
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

追踪平面物体在机器人技术中具有广泛的应用。然而,传统的模板跟踪算法,由于剧烈的物体外观变化,经常在一段时间后不能观察到快速物体运动或漂移。为了解决这些问题,本文提出了一种新的用于运动估计的置信度约束匹配算法和用于模板更鲁棒卡尔曼滤波器。通过与精确的遮挡检测器集成,本文方法通过从运动参数的计算中除去遮挡的像素,可在存在部分遮挡的情况下实现精确的运动估计。此外,所提出的卡尔曼滤波器采用新的控制输入模型来处理物体外观变化,这使本文的跟踪器具有高度的鲁棒性,可以防止突然的照明变化和严重的运动模糊。为了进行评估算法效果,本文将提出的跟踪器与两个公共数据集上的几个最先进的平面物体跟踪器进行比较。实验结果表明,本文的算法能够针对各种环境变化实现稳健的跟踪结果,并且在两个数据集上都显着优于基线算法。
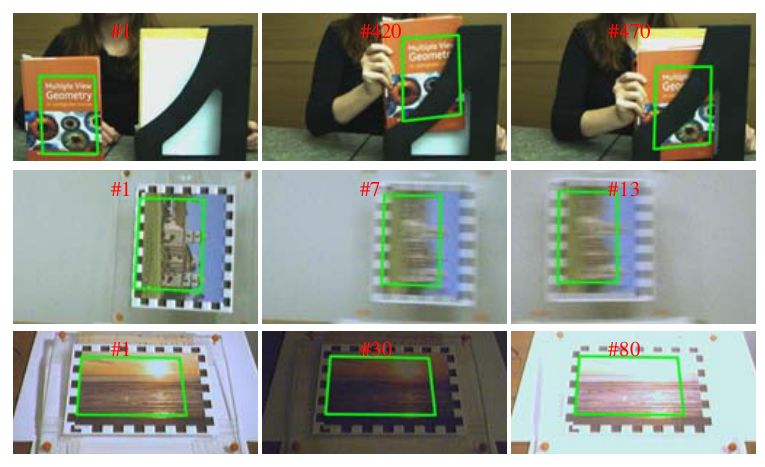
图1.在存在剧烈的外观变化时本算法的示例结果,包括部分遮挡(第一行),运动模糊(第二行)和照明变化(最后一行)。图中显示目标周围的放大区域以便更好地说明。绿色框表示算法的跟踪结果,帧索引显示在每个图像的顶部,第一帧显示初始化。

Abstract
Tracking planar objects has a wide range of applications in robotics. Conventional template tracking algorithms, however, often fail to observe fast object motion or drift significantly after a period of time, due to drastic object appearance change. To address such challenges, we propose a novel constrained confidence matching algorithm for motion estimation and a robust Kalman filter for template updating. Integrated with an accurate occlusion detector, our approach achieves accurate motion estimation in presence of partial occlusion, by excluding occluded pixels from computation of motion parameters. Furthermore, the proposed Kalman filter employs a novel control-input model to handle the object appearance change, which brings our tracker high robustness against sudden illumination change and heavy motion blur. For evaluation, we compare the proposed tracker with several state-of-the-art planar object trackers on two public benchmark datasets. Experimental results show that our algorithm achieves robust tracking results against various environmental variations, and outperforms baseline algorithms remarkably on both datasets.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:wscg
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





