想做机器人,有什么好的发展方向?
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
本文由计算机视觉life整理,如有侵权可联系删除。原文链接:
https://www.zhihu.com/question/19679140
原提问:
想做机器人,有什么好的发展方向?
冷哲:
机器人现在比较有前途的方向不外乎:工业机器人、无人飞行器(UAV)、无人驾驶汽车(UGV)、医疗机器人。工业机器人现在需求量越来越大,是个不错的行业,但目前主要做研究的都是公司了,大学里几乎不做了(但大学会用工业机器人做点别的研究,比如抓握研究,就是面对不规则物体时,如何判定形体,如何用机械手准确、稳定地抓握)。UAV主要是政府在投钱,军队用。UGV是政府和一些有前瞻性的公司,就目前的技术情况,恐怕十年内无法大规模商业化。医疗机器人是针对目前一些手术上的问题在做,目前有一定进展(达芬奇系统),商业前景很好,但是短期内恐怕推广不开。其他方向,比如家政机器人,有Willow Garage在探路,但是前景很不乐观。日本做类人步行机器人做的很欢,但是应用前景极其狭窄(目前来看仅可用于人难以深入的灾难环境操作原本为人设计的设施)。Boston Dynamics的四足步行机器人做得不错,但是应用范围过于狭窄,只有军队可能有兴趣采购。Sarcos雷神的外骨骼做得不错,有一定商业化前景,但是自重太大,对能源要求很高,成本也很高。
做机器人,主要有三个层面。
最底层做机械设计,主要是电机、传感器、人工肌肉、结构设计等等。
中层做控制设计,主要是传感器滤波和控制算法。
上层做感知,主要是根据传感器数据进行更高阶的信息融合,作更复杂的分析,比如说机器视觉、SLAM之类。
人工智能在机器人领域目前没看出来有什么大用处。甚至连机器学习都用的非常少。三个层面都不错。不过目前发展最快的是后两个层面。中层现在在工业界发展比较快。上层主要还是在学术界,目前还没有多少可供商业化的东西。下层现在很缓慢,主要是没有找到非常好的材料。
小心假设:
最近看了一篇文章,《环球科学》2014年第2期,机器人会改变世界吗?是德国一个有名的机器人专家写的。写得很好,介绍并展望了几个机器人研究方向。完全内行,又通俗易懂。
顺便插一句,机器人不跟纯CS的研究一样,机器人Digital与Analog的部分都很重要,是‘软+硬’的。而一旦涉及Analog的,德国、日本、瑞士乃至法国在机械、工艺、精密控制等的优势就会展现出来。而美国等(特别是印度)优势主要在于Digital的部分。当然,美国也有波音、Boston Dynamics这样的Digital与Analog都顶尖的公司。但在这些领域,就不像是在计算机、互联网领域等一支独大了,而且也没有绝对优势,算是fair play。印度则几乎只有Digital厉害。
说这些的目的,是想说明,如果纯Digital领域,中国几乎只需要盯着美国硅谷就行的话;在机器人领域,则不再适用了。我想,Google收购了这么多机器人公司,原因也很可能与之有关。
毕竟Google几乎是纯Digital的,但无人驾驶车中很多重要环节都是Analog有及其的密切关系。当然有识别环境的一环,算是‘软’的。但也有比如下雨天怎么开,雪地防止侧滑,山区上坡怎么上,下坡时怎么下,包括怎么刹车防止刹车装置温度过高,乃至空车满载模式之分,要对质量有自适应,乃至强风时、沙漠里等,乃至沙漠里怎么上坡等。而且就算是识别环境的能力,达到人的水平,那人的驾驶水平也有很大的区别啊,比如倒车的时候怎么打方向盘这里面的学问可够深的。像这些种种,大部分人会陷入‘局部最优’的方法,因为平时够用了,可一旦到了不同需要的情况,比如说的极端点,赛车,就不行了。而且人也是不断学习、‘自适应’的,在上一个新的非常复杂的路况时,起初也是需要不断试错积累经验。还有比如,有很多经验的东西,比如啪啪啪的声音,没有经验的驾驶员会害怕是不是发动机有问题了,而有经验的则知道是轮胎上的泥甩的声音。
无人驾驶领域,其领头的公司,是依附于软件公司如Google,或传统汽车公司如奔驰,或无包袱的电动车公司如特斯拉,或设备公司如Continental,还是会完全产生一个新的公司形态,只能拭目以待了。
其实整个机器人行业的复杂,就在于‘软’‘硬’很难分开。同样的软件,同样的控制算法,同样的硬件,实际的控制效果却很可能不一样。原因可能就在于比如一颗螺丝多拧或少拧了一圈。而这个区别,要靠控制算法参数的调节去应对的。但现在这些参数的调节多是靠人、靠经验,靠仿真或者自适应、自学习的算法还远远不行,更不要说容错控制(比如一个环节的性能突然发生了一定的变化,比如有很强的某种干扰,或刹车不那么灵乃至失灵,或无人机一个螺旋桨不转了等等)和自诊断(比如估计算法不work了。是获取数据的硬件装置出问题了如接触不良,还是算法参数不适合了等等)了。
岔开一句,Google做无人机刚宣告失败。说的玄乎一点,是‘基因’压根就不同。当然,并不是美国不行,这不也有3D Robotics。不过话说回来,如上文所说的,3DR也没有绝对优势。是大家都知道的。
当然,以上只是自己的拙见。欢迎指正。
机器人、无人机等,电子机械结合计算机的,机器人结合人工智能的,物理结合数学的,中国的机会不小。不知是不是国家“性格”的原因(当然也有语言的问题),日本德国等电子机械牛到不行,但软件互联网却几乎一无是处,受日本殖民影响颇深的台湾地区也是如此。印度软件牛(数论尤其牛),电子机械却差。美国的绝对优势在软件(编程是英语的变种,其实也是美国人思维、逻辑方式的外延),电子机械方面没有绝对优势,而且都外包出去了。中国两方面都一般,但结合起来(简单的说,就是北京软结合深圳硬),却可出来真正引领世界的公司。大家不可妄自菲薄。
King:
可以关注下仓储物流自动化行业的机器人方向:标准工业多轴机器人多轴机器人通常也被叫做机械手,在工业领域有着几十年的应用,比如在汽车工厂里,多道工艺流程完全无人化,焊接喷涂等工艺流程都是由工业机械手完成的。

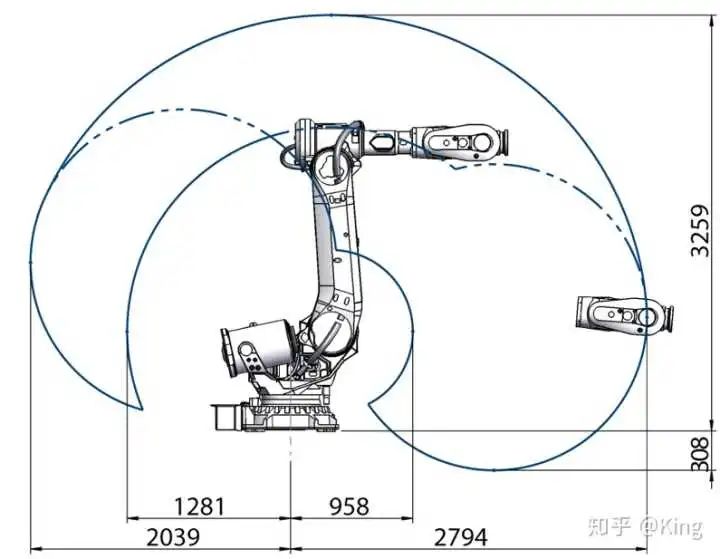
工业机器人在实际应用中由两部分组成,一部分是由ABB,KuKa,Fanuc等国际机器人巨头提供的机器人标准本体部分:

机器人本体可以在一定的半径范围内通过几个轴的动作配合能够到任意的位置
然后在标准机器人本体上加装上要实际操作的家具,也就是给机器人的胳膊上装上各种“手”,比如吸盘

或者焊枪

在仓储物流系统中常见的有如下的家具形式

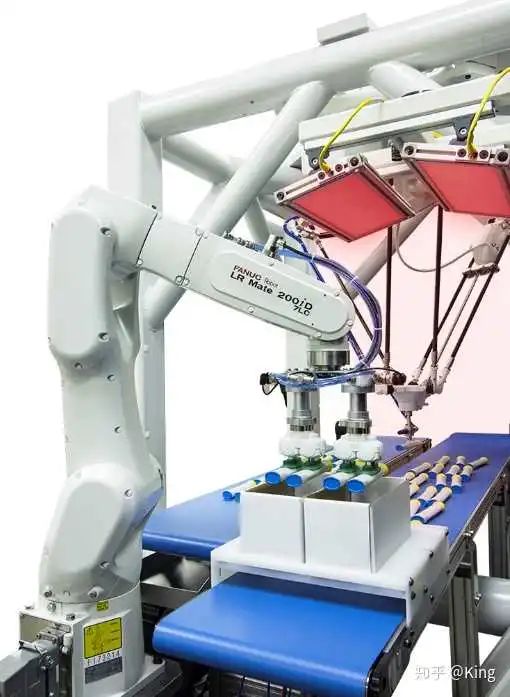
自动装箱机器人而多轴机器人的应用在仓储物流自动化系统里也有着非常广泛的应用,最常见的是装箱,即将零散的单间物品抓取到标准容器里,比如料箱或者纸箱里。通常用的是夹具是实盘和各种特制夹具。

如果被装箱的物品是标准的,同时又需要几块的如果被装箱的物品是标准的,同时应用的场合里需要的效率较高,会采用如下的“蜘蛛手”机器人本体来将上游的小物品抓取到标准的盒子里。

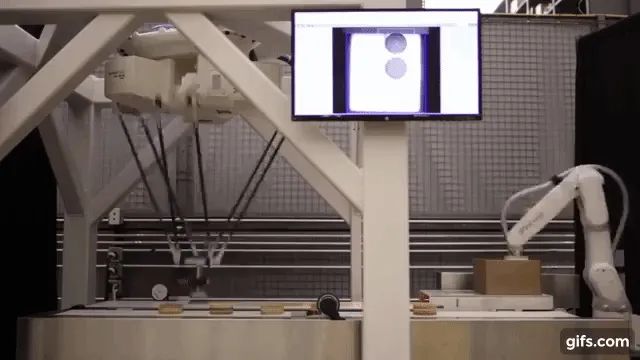
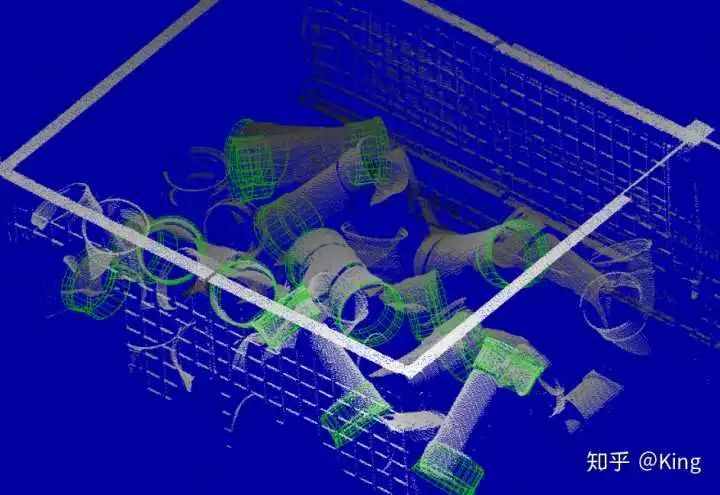
在自动装箱的过程中,经常会遇到如下的情况:在装箱作业中要抓取的物品的种类比较多,比如在电商的配种中心里,有一个用户下了一个订单,需要1盒牛奶和1纸铅笔,牛奶和铅笔这两种物料的体积尺寸完全不一样,同时由于这些物料从上游来打机器人抓取工位时也是被随机置放在抓取工位上,那对于机器人来说这是一个挑战,因为机器人最擅长的是做重复性固定的工作,而此时要抓取的物料大小不一样,具体位置未知,传统的自动装箱过程就不在适用。由此众多方案解决公司提出了视觉识别定位的方案,即对即将要被抓取的物品进行摄像头视觉扫描,经过一定的图像识别算法,判断他们的位置和大小后,将物品的坐标位置反馈给机械手进行抓取。

由上边的图例可以看出,对于复杂的案例下,除了机械手要知道物料的位置外,还需要知道要抓取的物品的位姿是如何的,因此这种情况下借助的图像是由3D摄像头捕摄到的。

拆码垛机器人在仓储物流中心或者厂内物流环节内,自动机器人拆码垛也是将会经常会用到的应用场景。比如把来的料箱整齐的码放到一个托盘上。

与上边讲述的自动装箱机器人类似,有些码垛要操作的物料单元可能是被随机摆放在一个工位上,同样的,标准机械手是无法直接抓取物料的,需要一个外接的识别系统告知机械手,要抓取的物料究竟在什么位置,这里也需要视觉识别技术。


协作机器人一个完整的自动化系统往往不是由一个单独的设备完成的,通常是由多个子系统或者子设备被集成到一起完成的。对于仓储物流中心里机器人的自动工作也不例外,一个复杂的动作可以由多种形式组合来完成,笼统上被称之为协作。近几年开发的双臂协作机器人就是其中一种应用自协作机器人,比如应用的案例有处理物料容器和抓取物料一并由一个机器人完成。

而在实际中更多的应用中,只有普通的六轴机器人要处理不同的工作,那可以采取自动换家具的方式。比如机器人要自己拿一个料箱,要自己抓取物品到料箱里,要自己将料箱码到托盘上,码号的托盘要被这个机械手摞到另外一个托盘上。这种工况下可以就可以采用一体机器人换家具的方式,家具可以被设计在一个复杂的多功能的家具上,也可以将家具单独设计放置在固定的家具待换工位上。

或者在需要效率较高的情况下,需要配置多台机器人负责不同的工作,互相配合完整一道完整的作业。

出入库订单机器人近几年有将机器人直接当做仓库搬运机器人来使用,即在机械手的周围放一圈货架,即可以当仓库存货,也可以当订单快速拣选。机器人可以直接操作到任何一个料箱上完成快速的进出库或者料箱订单拣选操作。


可移动机器人在仓储里的应用基本上可以归纳为机械手将各种物品从A点抓到B点。

但是机器人的工作范围是受到本体的工作半径的 限制,无法在更大的范围内工作。如果机械手可以移动,那就大大的增加的机器人工作的范围和柔性。而将机器人的底座放置到一个可移动的轨道上是个非常普遍的做法。


如果需要机械手移动的范围更加灵活,可以将机械手装在AGV上,AGV可以带着机械手自由的移动在一定的空间内,到达目的地后,机械手抓取需要的物料再配合AGV搬运到目的地。


直角坐标机器人以上的各种机器人都是基于标准多轴机器人本体配合夹具的方式完整物料的自动抓取的。还有一种在仓储物流自动化里用到的机器人叫直角坐标机器人或者龙门机器人或者桁架机器人。
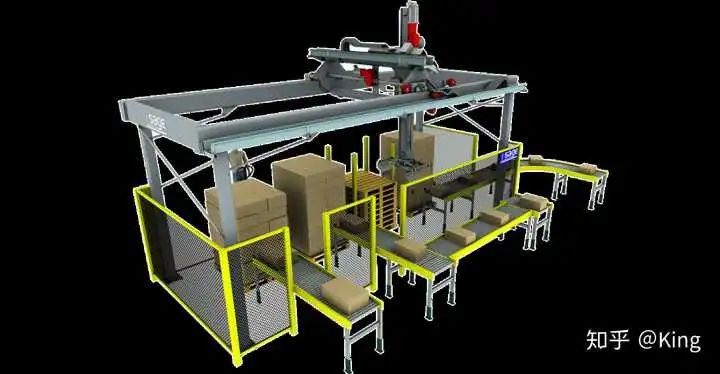
直角坐标机器人顾名思义就是机器人可以在X轴Y轴Z轴三个方向同时动作,在配合相应的家具完成物料的抓取。


叉车式AGV叉车式顾名思义就是将由人工驾驶的AGV通过配置一定的电控系统,传感器系统和软件使之成为无人驾驶的叉车在仓储物流中心内或者工厂内的工位之间进行物料搬运。

叉车时的AGV通常采用激光导航的方式,有的应用场合是完全用来物料的多点之间的搬运,包括与其他设备之间可以对接。

有些AGV除了承担搬运的任务外,也可以同时承担存储的功能,比如AGV将托盘根据系统的指令直接存放到货架单元里,这样的AGV通常有一定的高度提升功能。


或者AGV像人工叉车一样直接在仓库内进行落地堆垛码放。AGV的所有出入库指令与仓库管理软件WMS进行无缝连接。

近几年来随着密集存储系统的广泛应用,也有AGV配合穿梭板组合而成的全自动密集存储系统,替代掉以前由人工开叉车将穿梭板在不同巷道内的切换转移。


叉车AGV在大型仓库内也可以用来做拣选跟随机器人,AGV跟随当前下发的订单指令跟随仓库拣选员运行到正确的货位处,拣选人工将拣选后的物品放置在跟随其左右的AGV上。

背托式AGV(和潜入式AGV)在汽车制造行业经常能看到背托式的AGV,物料单元被存放在AGV的车身正上方,在不同的工位之间来回搬运,到达一个工位后等物料被处理完或完成本道工艺加工后再继续搬运到下一个位置点。

有的背托式AGV可以在机身上配置辊道输送机完成与上下游物料单元的接驳

在电商里大火的Kiva机器人也是一种背托式的AGV,AGV托着移动货架在拣选工位和仓库内分配的储存位之间来回转运。


牵引式AGV有些应用场景下,一次需要搬运的物料单元较多,而普通AGV通常一次只能带载一个物料单元,单位时间内的吞吐效率比较低,而采用牵引的方式,可以通过拉动小车的方式一次带载大量的物料一次性完成搬运,如下:



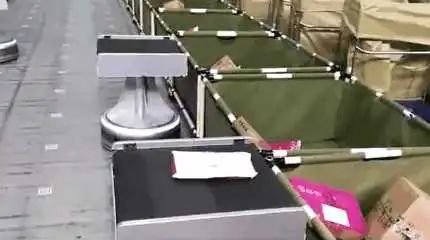
电商拣选AGV2017有个在网上特别火的视频,关于包裹拣选的机器人“小黄人”在一个钢平台上同时运行,每个小黄人搬运一个包裹,到系统指定的位置处,小黄人身上的翻板翻起来,将包裹落入位于钢板下边的一个袋子中,完成订单拣选。这个小黄人也是这几年在电商里应用非常广的一款AGV,适合单件包裹拣选,批量的AGV同时运行,单位时间内的吞吐量非常大。


相较于修建钢平台花费的时间和成本,一款新的拣选AGV也被推出市场,即在AGV上加载皮带输送机,包裹被AGV搬运到对应的拣选容器处,皮带带动包裹叠摞进相应的容器内。
“水陆两栖”AGV通常的背托式的AGV是在平整的地面上进行物料的搬运的,如果AGV既可以在普通地面上行走,又可以直接爬升到货架里,那就典型的“水路两栖”AGV

地牛式AGV在仓库内或者在工厂内工作过的人对地牛一定不会陌生,这是最简单经典的搬运设备,如果把地牛改造成AGV你会相信吗?


地牛式 的AGV非常小巧,适合在工厂内或者仓储物流中心里的货物搬运,如果说这是最精简的AGV,且慢,还有更简单的。


没错,地牛之间的物理连接没有了,两个货叉之间互相保持同步联动,使这款AGV更加精巧灵活。带机械手AGV传统的工业机械手,由于自身结构的臂展的限制,工作范围受到了局限,如果机械手可以移动,其柔性和灵活性更加突出。目前有将机械手置于可移动的AGV机身上,互相配合,完成轻载物料的搬运和拾取。

跟随性AGV每天在电商的订单中心里有大量的人工拣选的作业,需要拣选员根据订单行走于放置商品的货架之间,并将拣选后的料箱运回到发货区域。如果使拣选人员只专注于找到需要拣选的商品,不用搬运,那极大的降低了拣选员的劳动。跟随性AGV即可完成这样的功能。AGV跟着拣选人员并搬运拣选后的料箱,或者AGV根据订单指引拣选人员到正确的货位处进行商品捡取。


自适应可调整AGV通常处理托盘的AGV针对的处理单元为固定的位置,固定的外形尺寸,如果不同的托盘之间位置不一样,并且托盘尺寸也有差别,那就需要AGV能对托盘进行动态的位置检测和外形检测。位置检测用来找到托盘的坐标位置,外形检测用来调整AGV本身的货叉间接。目前有在AGV本体上揉合视觉识别和激光扫描的算法检测来动态调整作业时的位置和叉距。

自然导航AGVAGV在 运行过程中,要解决的第一步就是要能实时的找到当前自己的位置和要运行方向,即定位和导航技术。目前比较常见的为激光导引,磁道引和二维码导引。这些导引方式都需要事先在现场施工一些辅助导航的介质比如激光反光板,磁条,二维码等。如果导航过程中,无需再做现场施工,那系统的柔性有了提供并且施工周期也缩短了。参照与无人驾驶技术中的SLAM导航,仓储物流里的AGV也有SLAM导航的应用,也叫自然导航。


交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

投稿、合作也欢迎联系:simiter@126.com

长按关注计算机视觉life
哈哈哈赞





