【泡泡一分钟】基于深度学习的视觉SLAM闭环检测的性能评估(Things-1)
每天一分钟,带你读遍机器人顶级会议文章
标题:An Evaluation of Deep Learning in Loop Closure
Detection for Visual SLAM
作者:Yifan Xia, Jie Li, Lin Qi, Hui Yu and Junyu Dong
来源:iThings
播音员:四姑娘
编译: 刘彤宇
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——基于深度学习的视觉SLAM闭环检测的性能评估,该文章发表于iThings 。
闭环检测是SLAM中的关键模块,目的是减少构建环境地图时的累积误差。 传统的基于外观的方法大多采用通过专业计算得到的人工特征。最近深度学习的发展促使我们研究其在闭环检测中的应用。 与传统方法所不同,深度学习方法可以自动地从原始数据中学习特征,并且对复杂的环境变化有更好的适应性。 在本文中,我们对几种流行的深度神经网络和传统的闭环检测方法进行比较和分析。 我们根据它们在处理两个开放数据集时准确性和处理时间等方面的表现进行评估。 根据实验结果,我们可知深度神经网络适用于闭环检测。
本文主要的贡献是对目前主流深度神经网络,比如PCANet,CaffeNet,AlexNet,GoogleNet和传统的词带模型(BoW)和全局特征信息(GIST)在闭环检测中的性能表现做了比较分析。比较结果见下表。
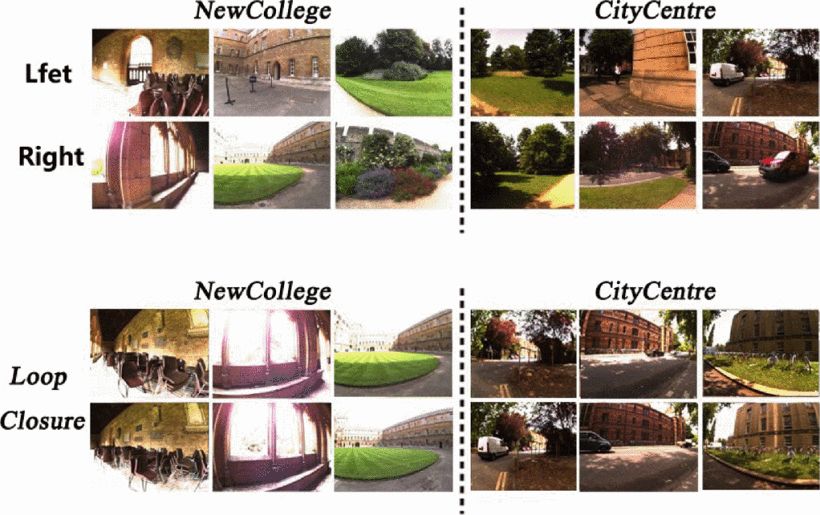
图1 两组公开数据集图片示例
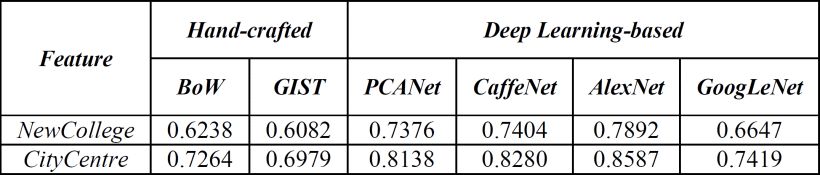
表一 精确度比较

表二 不同方法处理时间比较

Abstract
Loop closure detection is a crucial module in simultaneous localization and mapping (SLAM), which reduces the accumulative error in building the environment map. Traditional appearance-based methods mostly utilize hand-crafted features, which are designed based on human expertise. Recent advances in deep learning inspire us to investigate its application in loop closure detection. Different from traditional approaches, deep learning methods automatically learn features from raw data and has better adaptability to complex environment changes. In this paper, we perform a comparison and analysis of several popular deep neural networks and traditional methods for loop closure detection. We evaluate their performance on two open datasets in terms of accuracy and processing time. According to the experimental results, we conclude that deep neural network is suitable for loop closure detection.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





