【泡泡一分钟】城市车辆定位的多位置联合粒子滤波方法
每天一分钟,带你读遍机器人顶级会议文章
标题:A Multi-Position Joint Particle Filtering Method for Vehicle Localization in Urban Area
作者:Shuxia Gu, Zhiyu Xiang*, Yi Zhang and Qi Qian
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS)
编译:张宁
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

鲁棒的定位是自动驾驶汽车的先决条件。视觉里程计等传统视觉定位方法在远程导航中会产生误差累积。本文提出了一种基于概率滤波方法的灵敏路线图来解决这一问题。 为了有效地将自我轨迹与地图中的各种弯曲道路相匹配,呈现了基于锚点(AP)的新表示,其捕获轨迹上的主要弯曲点。
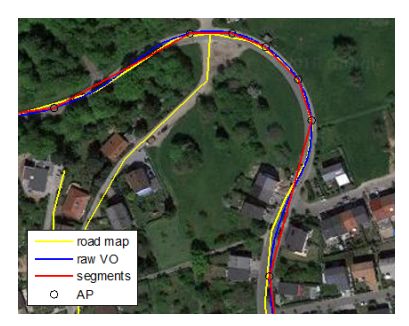
图1. 轨迹分割的一个例子
基于地图和轨迹的AP,提出了一种灵活的多位置联合粒子滤波(MPJPF)框架来校正位置误差。该方法具有联合自适应地估计一系列AP的能力,并且仅在具有低不确定性的情况下更新估计。它明确地避免了在大的不确定情况下(例如密集的平行道路分支)必须确定当前位置的缺点。
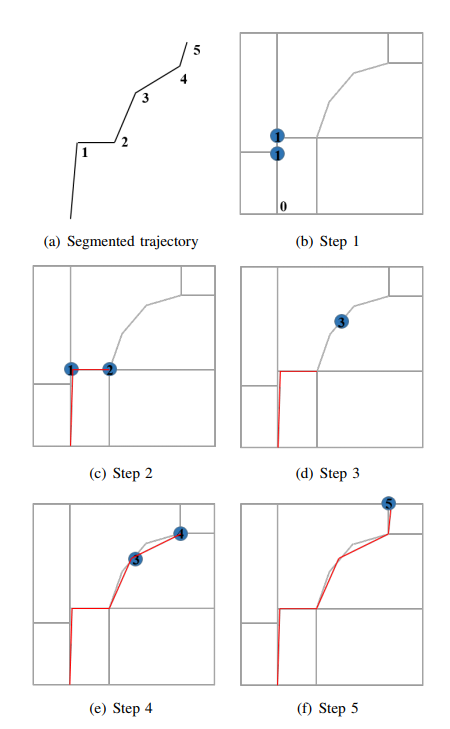
图2. MPJPF在VO轨迹上的示意图
实验结果表明,无论轨迹多长或弯曲,我们的方法都能有效地减少定位误差。它提供了一种新的有效方法,可以在没有GPS或其他类型的绝对位置传感器的帮助下进行长时间的车辆定位。
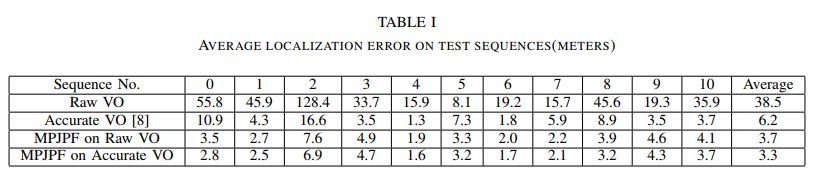
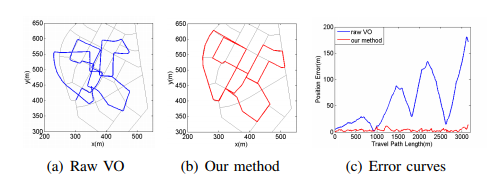
图3. 来自序列00的MPJPF滤波结果

Abstract
Robust localization is a prerequisite for autonomous vehicles. Traditional visual localization methods like visual odometry suffer error accumulation on long range navigation. In this paper, a flexible road map based probabilistic filtering method is proposed to tackle this problem. To effectively match the ego-trajectory to various curving roads in map, a new representation based on anchor point (AP) which captures the main curving points on the trajectory is presented. Based on APs of the map and trajectory, a flexible Multi-Position Joint Particle Filtering (MPJPF) framework is proposed to correct the position error. The method features the capability of adaptively estimating a series of APs jointly and only updates the estimation at situations with low uncertainty.It explicitly avoids the drawbacks of obliging to determine the current position at large uncertain situations such as dense parallel road branches. The experiments carried out on KITTI benchmark demonstrate our success.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




