【斯坦福大学李飞飞高徒朱玉可博士毕业论文】闭合感知-动作循环: 通用自主机器人探索
【导读】斯坦福大学李飞飞的得意门生朱玉可博士今年 8 月取得斯坦福大学博士学位,并将于 2020 年秋季加入德克萨斯大学奥斯汀分校(UT-Austin)担任计算机科学助理教授。他的博士论文关于为能够理解并与现实世界交互的通用机器人构建智能《Closing the Perception-Action Loop: Towards General-Purpose Robot Autonomy》在其个人主页日前公开,感兴趣的读者可以参看。
http://ai.stanford.edu/~yukez/
http://ai.stanford.edu/~yukez/papers/yukezhu_phd_dissertation.pdf

今年 6 月,朱玉可在斯坦福大学的博士论文答辩后,与李飞飞等人合影。
在斯坦福大学,他与李飞飞和 Silvio Savarese 教授(李飞飞的丈夫)一起在斯坦福视觉与学习实验室工作。同时,他也是斯坦福人工智能和机器人研究小组(Stanford People, AI & Robots Group,PAIR)成员。
博士论文《Closing the Perception-Action Loop: Towards General-Purpose Robot Autonomy》
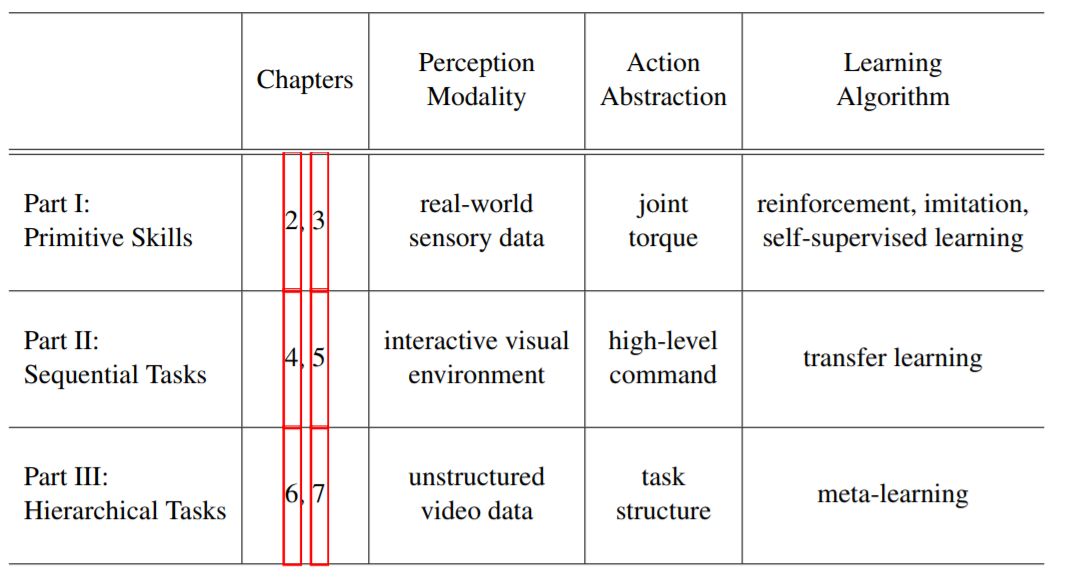
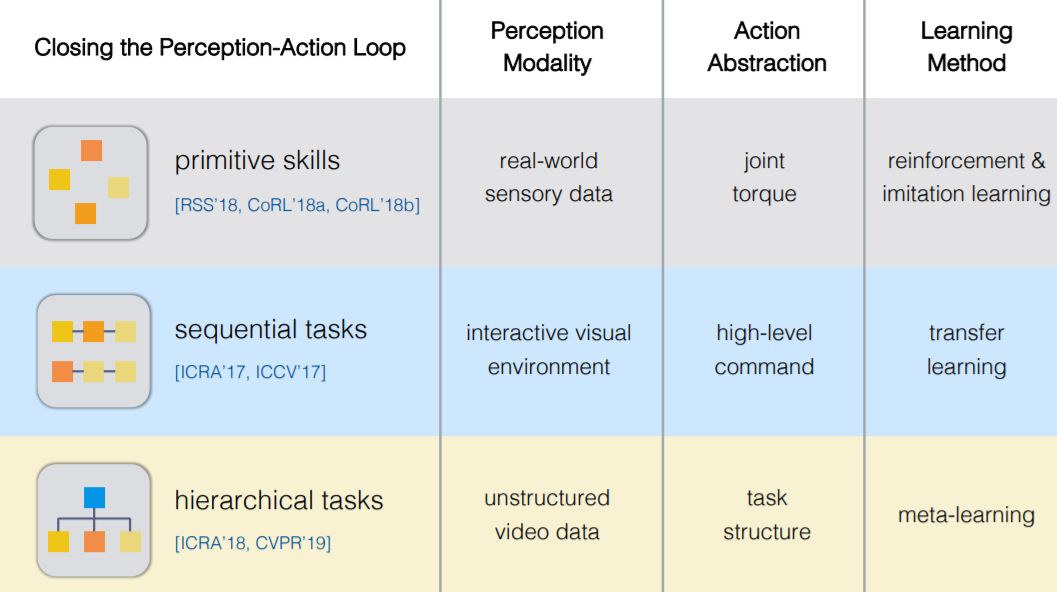
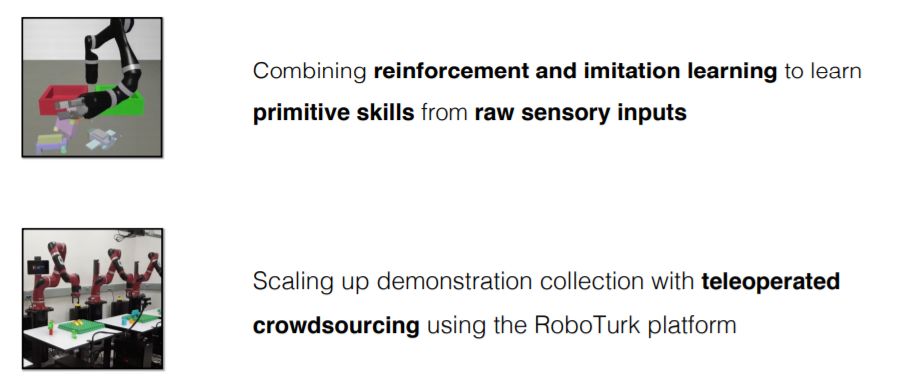
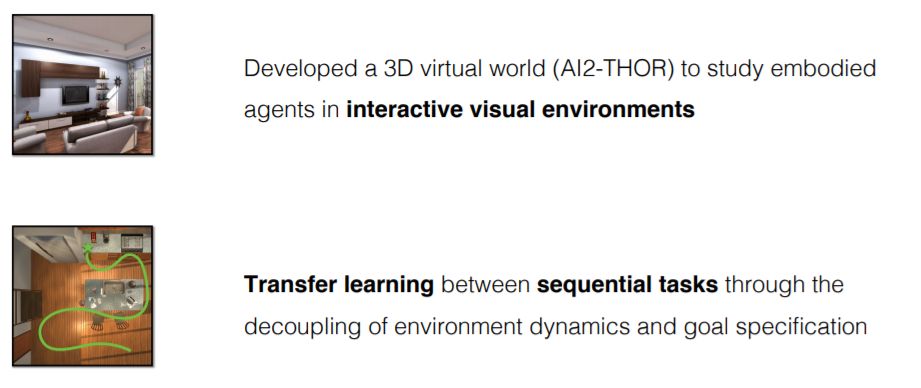
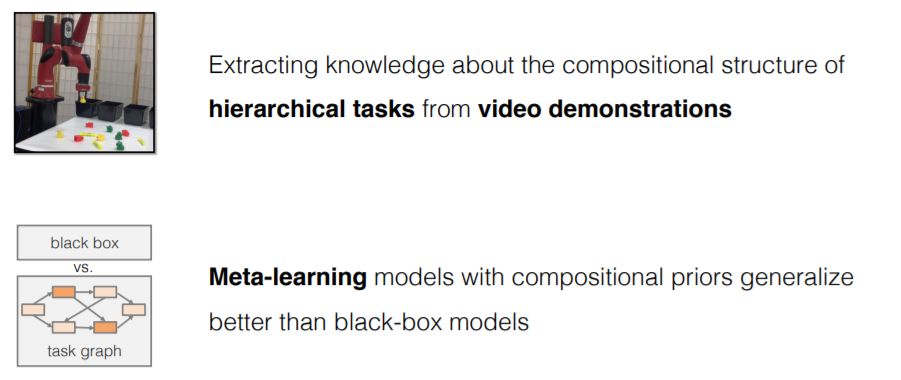
工作总结
请关注专知公众号(点击上方蓝色专知关注)
后台回复“GPRA” 就可以获取《闭合感知-动作循环: 通用自主机器人探索》论文pdf和答辩PPT下载链接~



相关内容
朱玉可目前是英伟达研究中心的高级研究员,也是斯坦福大学的访问学者。从2020年秋季开始,他将以计算机科学助理教授的身份加入德州大学奥斯汀分校。他的目标是为能理解现实世界并与之互动的通用机器人制造智能。他的研究处于机器人技术、计算机视觉和机器学习的交叉领域。他侧重于开发用于一般目的自治的感知和控制的方法和机制。他于2019年9月在斯坦福大学获得博士学位,与李飞飞教授和西尔维奥·萨瓦雷兹教授一起在斯坦福大学视觉与学习实验室工作。他是Stanford People, AI & Robots Group创始人。



