【泡泡点云时空】Potree:基于Web浏览器的大规模点云渲染
泡泡点云时空,带你精读点云领域顶级会议文章
标题:Potree Rendering Large Point Clouds in Web Browsers
作者:Markus Schuetz. Vienna University of Technology
来源:the Institute of Computer Graphics and Algorithms, TU Wien.
编译:周志
审核:徐二帅,吕佳俊
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权
大家好,今天给大家带来一篇关于点云渲染的文章,这篇文章是Markus Schuetz的学位论文。其成果还应用到著名的无人机开源项目ODM/WebODM中。Potree官网地址:http://potree.org/。上面有示例、论文、点云转换工具及Potree源码。

摘要

本文介绍一种基于Web的海量点云渲染器:Potree。它允许用户在稳定的web浏览器上实时查看来自例如激光雷达或摄影测量的十亿级点云数据集。
Web浏览器中点云的可视化的一个主要优势是它允许用户在不安装第三方应用程序的情况下将他们的数据集分享到客户端或公共平台上,前提是需要转换数据的格式。渲染器能够实现在在线海量点云加载和测量,Potree可以使用户查看、分析和验证原始点云,而无需花费大量的时间和潜在的昂贵的网格化步骤。
在Web浏览器中,无需预先加载大量数据即可实现数十亿个点的流式处理和渲染,这是通过一种分层结构实现的,该结构以不同分辨率存储原始数据的子样本。低分辨率存储在根节点中,随着每个级别的增加,分辨率逐渐增加。该结构允许Potree剔除视椎体外的点云区域,并以较低的细节级别渲染远处的区域。
Potree是一个开源的点云查看器,它能够在Web浏览器中实时呈现高达5970亿点的点云数据集,压缩后大约1.6太字节。
主要贡献
改善渲染行为的贡献:
提出了一种具有层次结构的新文件格式,其允许Potree按需加载大量点云层次结构;
提出了一种快速、渐进的高度剖面查询方法。即使包含亿级点云的剖面也可快速显示;
提出了自适应点大小模式,可将点大小调整为细节级别。
改善渲染结果的贡献:
提出了一种快速的Poisson-disk子采样方法,它比网格化方法创建更自然的子集;
提出了一种插值展开模式,产生类似Voronoi的最近邻渲染;
提出了高质量喷洒(Gaussian splats)的自适应混合深度。混合深度指定点混合的范围,以便创建更平滑和抗锯齿的结果。
主要渲染成果
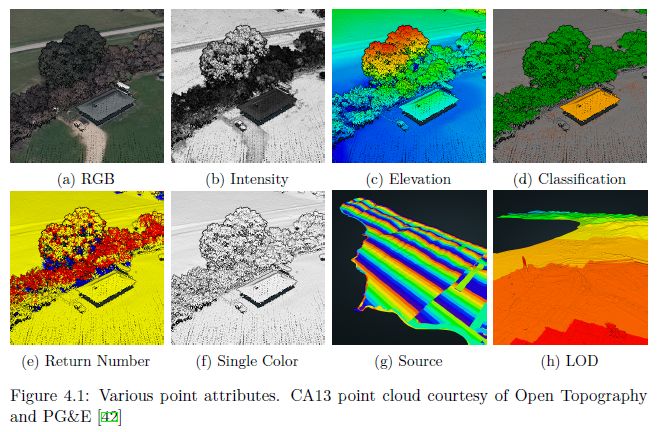
图1 点云要素渲染:点云可按照RGB、Intensity、Elevation、Classification、Return number、Point Source、Level of Detail等要素进行渲染。
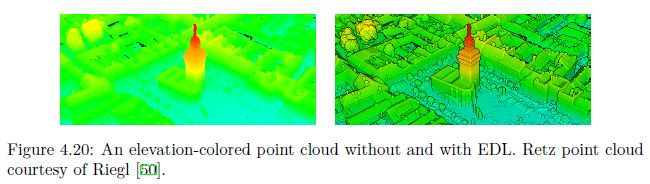
图2 Eye Dome Lighting(EDL)是一种沿着轮廓创建照明表面和轮廓的方法,不需要法线。该算法在概念上类似于深度图上的边缘检测过滤器。
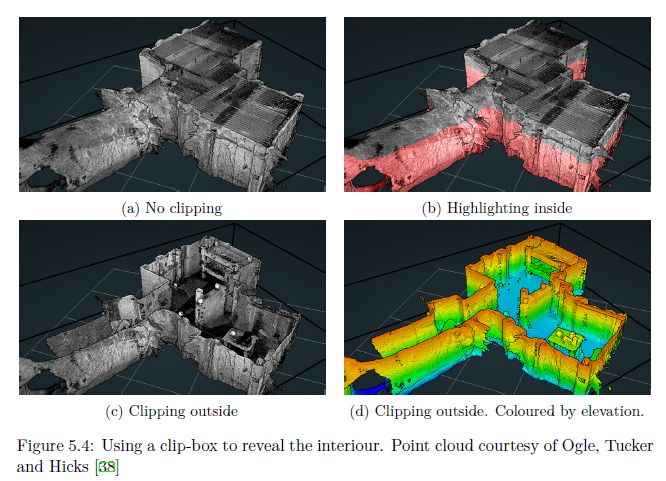
图3 剪贴框允许用户通过突出显示框内的点或剪贴框外的点来关注特定的感兴趣区域。它们有助于剔除那些原本会分散注意力或阻塞视线的点。
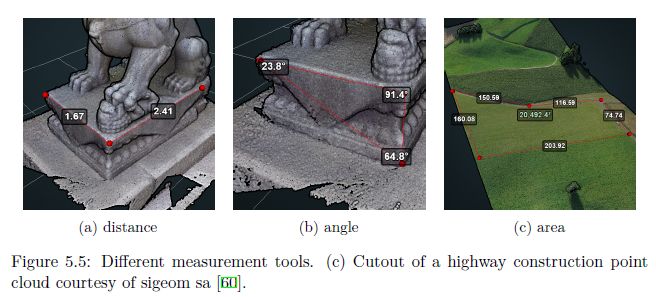
图4 测量工具:坐标测量、距离测量、高度测量、面积测量、体积测量等,可自定义测量过程中点的个数。此外还可裁切断面并显示输出。

Abstract
This thesis introduces Potree, a web-based renderer for large point clouds. It allows users to view data sets with billions of points, from sources such as LIDAR or photogrammetry, in real time in standard web browsers.
One of the main advantages of point cloud visualization in web browser is that it allows users to share their data sets with clients or the public without the need to install third-party applications and transfer huge amounts of data in advance. The focus on large point clouds, and a variety of measuring tools, also allows users to use Potree to look at, analyze and validate raw point cloud data, without the need for a time-intensive and potentially costly meshing step.
The streaming and rendering of billions of points in web browsers, without the need to load large amounts of data in advance, is achieved with a hierarchical structure that stores subsamples of the original data at different resolutions. A low resolution is stored in the root node and with each level, the resolution gradually increases. The structure allows Potree to cull regions of the point cloud that are outside the view frustum, and to render distant regions at a lower level of detail.
The result is an open source point cloud viewer, which was able to render point cloud data sets of up to 597 billion points, roughly 1.6 terabytes after compression, in real time in a web browser.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



