【泡泡一分钟】一种滚动快门感知差分SfM和图像校正算法(ICCV2017-99)
每天一分钟,带你读遍机器人顶级会议文章
标题:Rolling-Shutter-Aware Differential SfM and Image Rectification
作者:Bingbing Zhuang, Loong-Fah Cheong, Gim Hee Lee
来源:International Conference on Computer Vision (ICCV 2017)
编译:陈世浪 周平
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

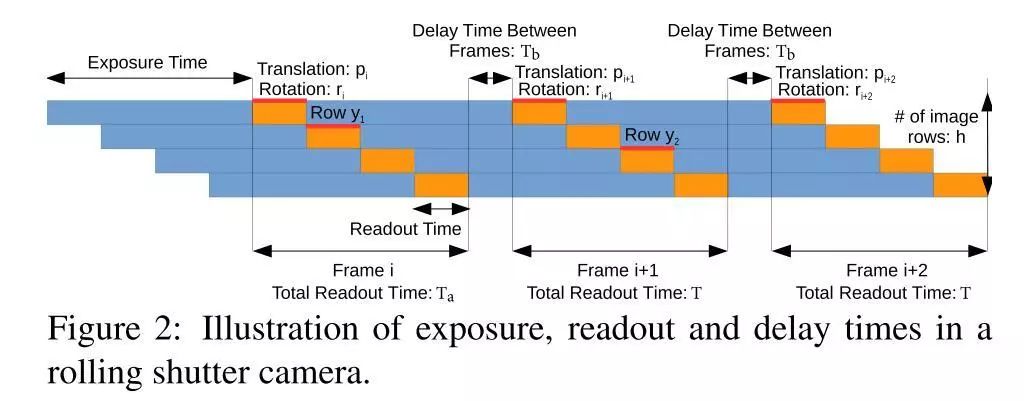
本文提出了一种对运动恢复结构(SFM)进行差分改进的方法,该算法可以在不考虑滚动快门(RS)伪影情况下根据连续帧估计相对位姿。特别地,我们证明了在恒定速度假设下,通过对每个光流进行线性缩放操作,可以很容易地纠正由滚动快门效应引起的误差。
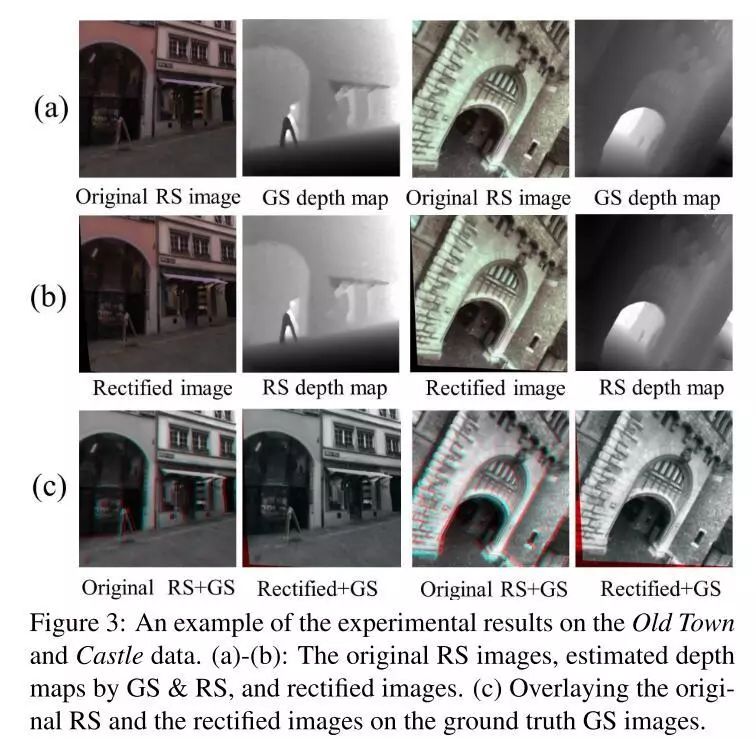
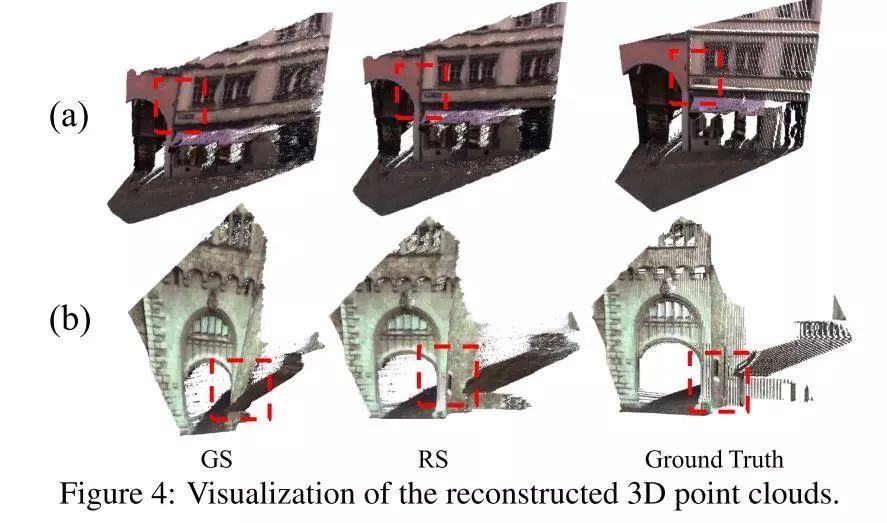
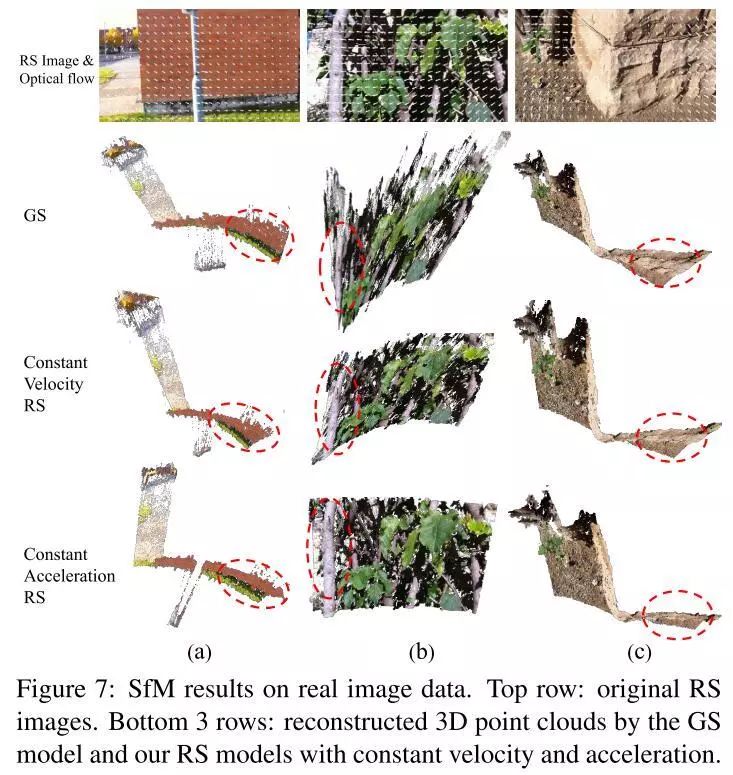
我们进一步提出了9-point算法,以恢复滚动快门相机在恒定加速度下的相对姿态。我们认为,从RS相机的相对姿态中恢复稠密深度图可用于图像校正,以恢复高质量的全局快门图像。在合成和真实的RS图像上表明,我们的RS感知差分SFM算法在相对位姿估计和三维重建方面比标准的SFM算法假设一个全局快门相机模型能得到更精确的结果。
我们还演示了我们的RS感知翘曲图像校正方法优于目前最优秀的商业软件产品,如Adobe After Effects和Apple Imovie。


Abstract
In this paper, we develop a modified differential Structure from Motion (SfM) algorithm that can estimate relative pose from two consecutive frames despite ofRolling Shutter (RS) artifacts. In particular, we show that under constant velocity assumption, the errors induced by the rolling shutter effect can be easily rectified by a linear scaling operation on each optical flow. We further propose a 9-point algorithm to recover the relative pose of a rolling shutter camera that undergoes constant acceleration motion. We demon- strate that the dense depth maps recovered from the relative pose of the RS camera can be used in a RS-aware warping for image rectification to recover high-quality Global Shutter (GS) images. Experiments on both synthetic and real RS images show that our RS-aware differential SfM algorithm produces more accurate results on relative pose estimation and 3D reconstruction from images distorted by RS effect compared to standard SfM algorithms that assume a GS camera model. We also demonstrate that our RS-aware warping for image rectification method outperforms state-of-the-art commercial software products, i.e. Adobe After Effects and Apple Imovie, at removing RS artifacts.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



