【泡泡一分钟】基于角点的多焦距全光相机几何标定(ICCV2017-100)
每天一分钟,带你读遍机器人顶级会议文章
标题:Corner-Based Geometric Calibration of Multi-Focus Plenoptic Cameras
作者:Sotiris Nousias, Francois Chadebecq, Jonas Pichat, Pearse Keane, Sebastien Ourselin, Christos Bergeles
来源:International Conference on Computer Vision (ICCV 2017)
编译:林旭滨 周平
审核:陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文提出了一种利用原始图像对多焦距全光相机的几何标定方法。多焦距全光相机的特点在于具备数种在空间上与相机传感器相对齐的微透镜,使得能产生不同放大倍率的微图像。这种多透镜设计在图像处理的计算量上具有优势,但是却使得标定过程较为复杂。我们的方法能检测微透镜的类型、检索出微透镜的空间排列,并且能估计出相机的内参及外参,从而全面刻画具体的相机类型。受经典的针孔相机标定的启发,我们的算法在棋盘格角点上进行开展,其中角点的检索是通过用户的微图像角点检测器实现的。实验设备及原始图像如下图所示:
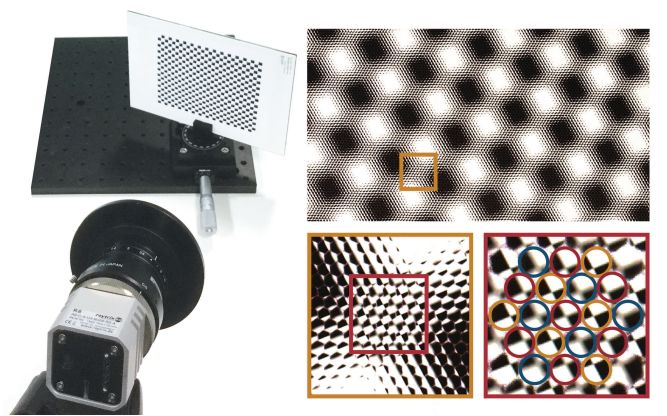
图1. 标定系统展示(左),多焦距全光相机所得原始图像(右)
本文所提方法能套用重投影误差从而实现误差最小化。我们的算法和当前领先的方法进行了对比,并通过控制和手控的实验演示,我们提出的标定方法实现了通向精准3D重构和运动恢复结构的第一步。

Abstract
We propose a method for geometric calibration of multifocus plenoptic cameras using raw images. Multi-focus plenoptic cameras feature several types of micro-lenses spatially aligned in front of the camera sensor to generate micro-images at different magnifications. This multi-lens arrangement provides computational-photography benefits but complicates calibration. Our methodology achieves the detection of the type of micro-lenses, the retrieval of their spatial arrangement, and the estimation of intrinsic and extrinsic camera parameters therefore fully characterising this specialised camera class. Motivated from classic pinhole camera calibration, our algorithm operates on a checker-board’s corners, retrieved by a custom microimage corner detector. This approach enables the introduction of a reprojection error that is used in a minimisation framework. Our algorithm compares favourably to the state-of-the-art, as demonstrated by controlled and freehand experiments, making it a first step towards accurate 3D reconstruction and Structure-from-Motion.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



