【泡泡图灵智库】适用于城市规模激光雷达建图的鲁棒的位姿图方法(IROS)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:A robust pose graph approach for city scale LiDAR mapping
作者:Sheng Yang, Xiaoling Zhu, Xing Nian, Lu Feng, Xiaozhi Qu and Teng Ma. This work was done when the authors were with the DiDi Map Business Division.
来源:IROS 2018
编译:林瑞豪
审核:张蕾
提取码:9vg2
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——A robust pose graph approach for city scale LiDAR mapping,该文章发表于IROS 2018。
本文提出了一种重建全局一致的城市规模3D高清(HD)地图的方法。当前用于消除累积偏移的方法大多是基于扫描匹配因子约束下的位姿图优化。图中未对齐的边缘可能对结果产生负面影响。 为了解决上述问题并进一步处理由城市环境中的多任务采集引起的不一致性,我们引入了因子图的优化结构,该结构考虑了系统初始化偏差。其中扫描匹配因子通过新的分类器和鲁棒的优化策略双重验证。此外,我们采用多假设扩展卡尔曼滤波器(MH-EKF)来移除动态对象。 定量实验结果表明,所提出的方法在地图质量方面优于当前最优的技术。
主要贡献
1.本文提出了一个用于获取3D高精度地图的位姿图框架。本文设计了一个精确的位姿图结构来鲁棒地优化多个事务,并且合并了一个可靠的分类器来滤除大量的扫描匹配因子。
算法流程
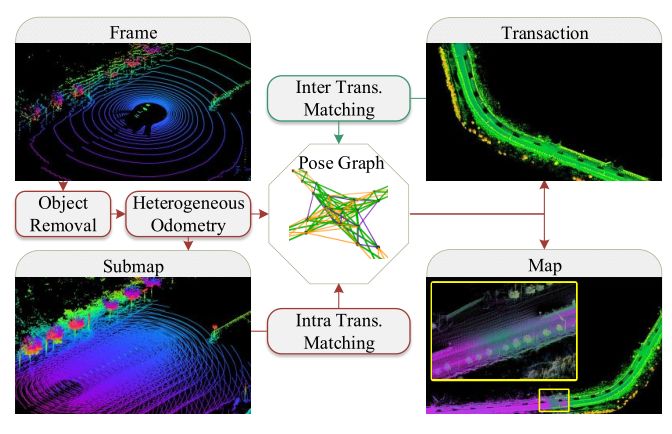
图1 系统的数据流,最后的地图在里程计和点云注册的约束下优化。红色的模块在单个事务情况和多个事务情况中都考虑,绿色的模块则只在多个事务情况中考虑。
在建图步骤,3D雷达数据划分为四个级别,frames submap(位姿图优化阶段的刚性分片),transaction(事务,对应一个任务 ) 最终的地图在事务内和事务间都进行了优化。
1. 位姿图公式化
1.1、自适应子图建设
本文在后端优化提出了分层的子图重建。连续的帧在连接之前先进行调整和追踪。
先前的方法使用固定帧间隔或者累积 位移/旋转 阈值进行划分,我们利用定位的不确定性来实现一个自适应的策略,将有高不确定性的区域划分为小的章节,以至于可以通过子图优化获得更好的非刚体位姿。特别地,对于一个构造的子图,我们持续地更新它的里程计的协方差:

建立新的子图的准则为:

对于每一个重建的子图 ,我们将它的第一帧视为参考帧计算子图位姿,对连接在一起的子图降采样,网格大小设置为5cm。
1.2、子图匹配因子
最终地图的全局一致性通过注册空间相关的子图来保证,由此产生了子图匹配因子这个约束:

为了获得鲁棒的注册结果,系统针对每一对子图尝试了重复注册算法。它们的结果随后被用于位姿评估模块来拒绝那些落入局部收敛的未对齐的对。
2.验证图因子
估计的位姿的质量验证依赖因子图结构的正确性。我们提出了我们的两步策略来验证那些注册的正确性。
2.1、分类scan匹配因子
我们训练了一个分类器来删除在前端的追踪因子,其中来自位姿预测的特征和子图注册的特征全部都考虑在内。特别的,对于一对候选对Sx和Sy ,记从INS中估计得到的位移为Txy,导出一系列特征,其中包含了置信度、方差和注册尝试的效率。
然后我们使用随机森林分类器来分离正确的和错误的注册。
2.2 、优化策略
虽然前述的前端验证步骤足以滤除大量的回环,但是单个事务中建立的位姿图 还是可能包含假阳性因子。因此,我们选择用更加鲁棒的方法而不是传统的图优化框架来自动抑制不兼容的因子。我们的优化问题定义如下:
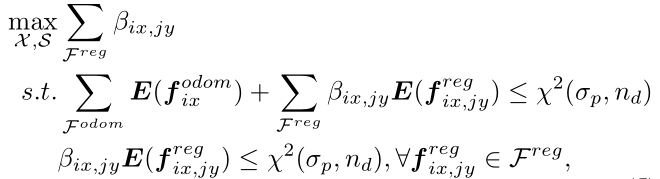
求解等式5有两个步骤。 第一步是事务内的滤波,因子在事务内评估。第二步,优化算法只考虑事务间因子的有效性。这个策略有效地控制了优化的规模,由于事务对之间会有重叠的区域,在实际中可以通过应用调度减少。
3.动态对象的时空移除
为了滤除可以移动物体,我们使用了MH-EKF来获得道路对象的一致追踪。我们使用MV3D来检测每一帧的动态对象,然后进一步提取内联点来计算这些候选者的更准确的位移。
如果对象成功检测到或是假设超过一个阈值,对象会被移除并且那些对应于去除点的激光束通过RANSAC 沿着激光方向延伸到适合的地面,用于填充孔。合并时空的信息来实现一致的滤波是至关重要的,尤其是物体离车辆很远的时候,可以呈现出那些很难被发现的稀疏分割片段。在实际应用中,这种滤波实施了两次(前向和后向)来获得更好的回调。
主要结果
1. 本文的扫描系统的简短介绍
本文的扫描系统包括INS、差分GPS、velodyne HDL-32E,采用线下标定,车辆以40km/h 、60km/h的四度分别在城市道路、高速道路上行驶几个小时。人工放置和测量了多个有代表性的对象(道路标志和地标见下图 )包括常见的道路区域和弱GNSS信号区域,每一对有同样对象用于多事务间的评估。
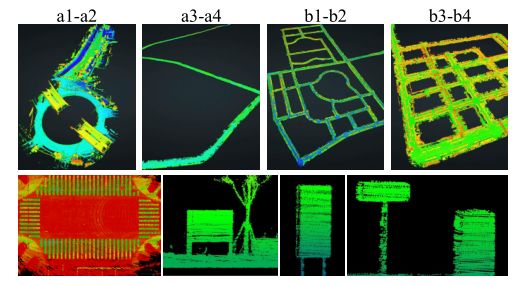
图2 本文评估所用的场景和测量标志,上一行:场景的概观,下一行:用于定量测量的代表性标志。
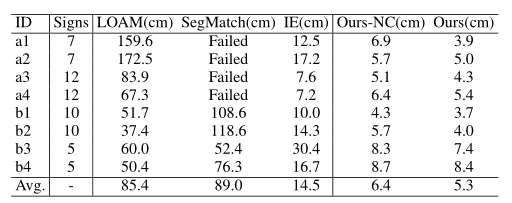
2.单个事务的评估
和LOAM segmatch 以及 IE 进行了比较。IE是商业化的精炼RTK轨迹的方法。 实现了没有前端 scan-matching 分类器作为基准来展示我们的策略的有效性。 每个系统输入8个scan,输出的轨迹用于帧的连接。
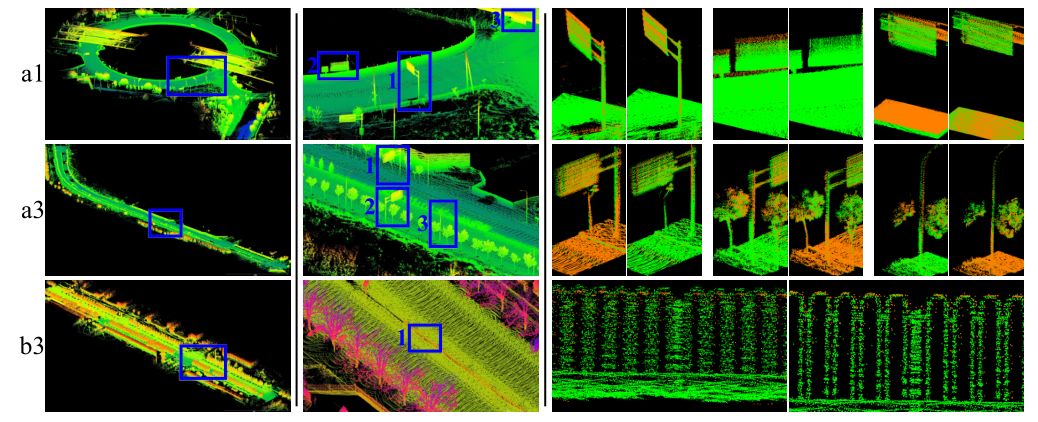
这些事务的重建质量如下图和下表所示:
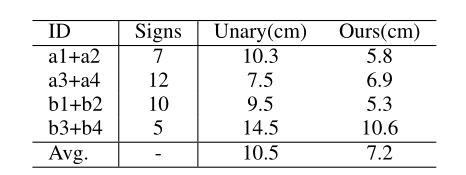
3.多事务情况
为了评估集成多个事务的能力,我们比较了提出的 位姿图结构 和最初的图结构(不包括偏置,里程计因子作为相关变量的一元因子存在)。如下表所示,用相对位姿替换一元先验对于连接不同硬件配置的多个任务是至关重要的。
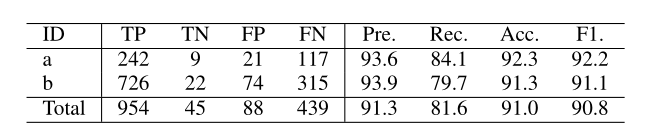
4.随机森林的分类结果
随机森林分类器的在测试集合上的效果如下表,总的来说,我们获得91.3%的精度 并且可以滤除大量的假阳性候选者,保证了回环候选者的质量而保证后端优化获得更好的结果。
5.动态对象滤除的精度
下表展示我们的基于MH-EKF的时空移除的策略的效率。所列出的结果清楚地展示了我们的方法的效率,追踪的策略明显地提高了回调。

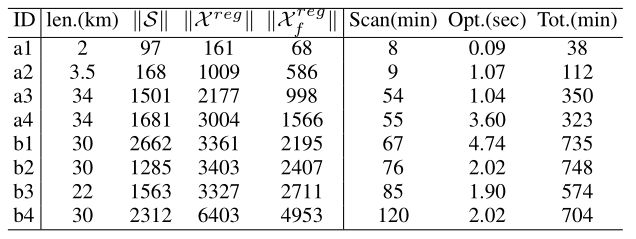
6. 运行时间
我们在下表中列出了总的长度和每一个事务的构造图的规模,还展示了scanning时间,图优化时间和总的运行时间。

Abstract
This paper presents a method for reconstructing globally consistent 3D High-Definition (HD) maps at city scale. Current approaches for eliminating cumulative drift are mainly based on the pose graph optimization under the constraint of scan-matching factors. The misaligned edges in the graph may have negative impacts on the results. To address this problem and further handle inconsistency caused by multi-task acquisitions in urban environments, we introduce a refined structure of the factor graph considering systematical initialization bias, where the scan-matching factors are twice validated through a novel classifier and a robust optimization strategy. In addition, we incorporate a multi-hypothesis extended Kalman filter (MH- EKF) to remove dynamic objects. Quantitative experimental results demonstrate that the proposed method outperforms state-of-the-art techniques in terms of map quality.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



