【泡泡图灵智库】RFM-SLAM:利用相关特征测量分开估计方向与位置(arXiv)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:RFM-SLAM: Exploiting Relative Feature Measurements to Separate Orientation and Position Estimation in SLAM
作者:Saurav Agarwal,Vikram Shree,Suman Chakravorty
来源:arXiv:2016
编译:尹双双
审核:杨健博
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——RFM-SLAM:利用相对特征测量分开估计方向与位置,该文章发表于ICRA 2017。
当已知机器人的运动方向时,SLAM问题有一个特殊的属性,即机器人的位姿和特征点的位置求解可以看作一个线性最小二乘问题。本文通过相对特征-特征测量构建一个SLAM框架来利用这个结构特性。相对特征测量用来给位姿-位姿方向约束建立一个线性估计问题,然后求解迭代的非线性流形上优化问题,以计算给定相对旋转约束的机器人方向的最大似然估计值。得到运动方向后,就可以线性求解机器人位置和构图。相比基于特征的SLAM 标准的图优化方法,我们通过一个较小的优化来减小了非线性优化的计算压力。另外,实验结果表明我们的方法避免像已有方法采用视觉里程计来初始化,随传感器噪声增加使得精度逐渐下降而导致灾难性错误。我们通过全面的模拟实验和已有最先进的求解方法比较来展示方法的有效性。
主要贡献
1、RFM-SLAM减少了优化问题的计算复杂度,比如有N个位姿和L个路标,本文相对于现有方法(针对平面SLAM)求解3N+2L个参数,只需求解N个变量。
2、通过分出方向估计,把位姿和路标位置估计当作一个线性最小二乘问题,不需要位置初值。另外通过实验表示随着视觉里程计噪声增加,本文方法可以避免像依靠初值的非线性优化方法那样产生灾难性错误。
算法流程
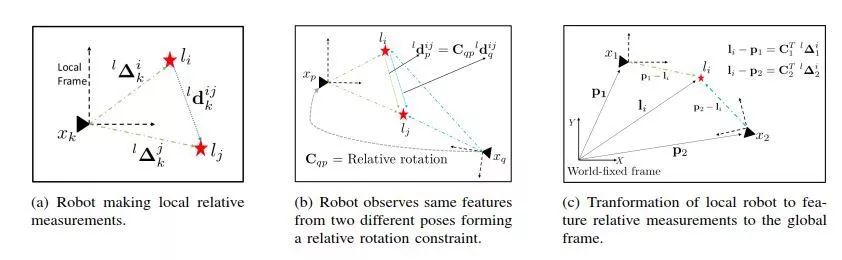
图1 (a)机器人在时间tk观测到两个特征lk,lj,可视范围内的矢量测量可以得到特征在局部坐标系内相对的位姿lΔik和lΔjk,然后转换为两特征之间的变换测量ldijk。(b)机器人从位置xp(绿色箭头)和位置xq(蓝色箭头)观测值,可见这两个相同特征在位置之间构成一个旋转约束。(c)机器人从两个位置看到同一个路标,局部测量值转换到全局坐标系。
1)把在每个位置时可视范围内的特征观测矢量转换为移动机器人局部坐标系中的相对位置测量,然后计算特征到特征的平移矢量。

2)计算位姿的相对旋转约束,这些位姿要么通过本有的视觉里程计连接,要么通过观察到的相同路标,或两者。
3)通过先前得到的约束,计算移动方向的最大似然估计。

4)全局的线性估计,求机器人和特征的位置。
主要结果
1、与GTSAM对比
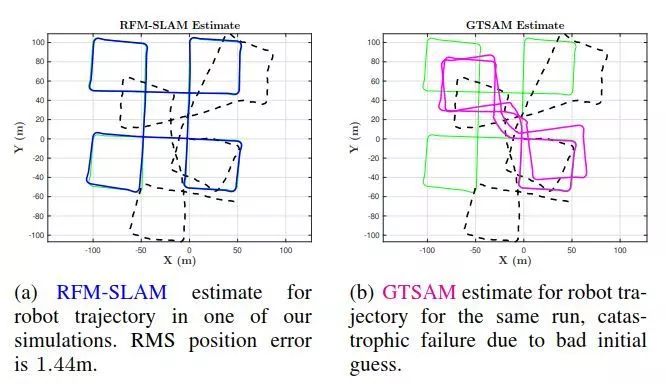
图2 2000个节点的地图M2的模拟结果,绿色表示真实轨迹和路标,黑色表示视觉里程计,蓝色表示RFM-SLAM结果,品红为GTSAM结果。忽略绘制特征。
2、场景比较
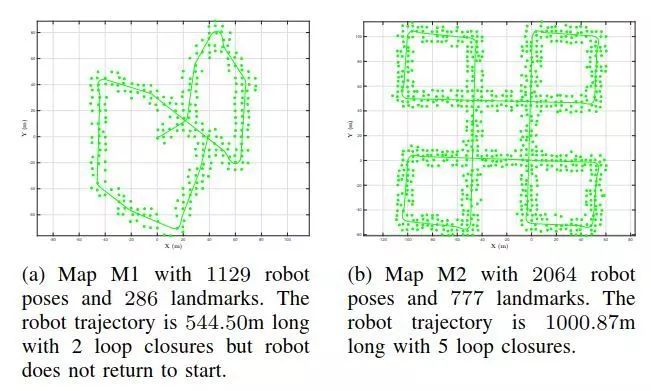
图4 用来模拟实验的两种场景和比较
3、增加视觉里程计的噪声
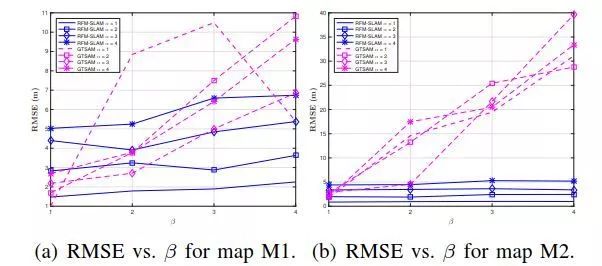
图5 当噪声水平β为不同的α增加时,机器人位置的RMSE值。蓝色表示RFM-SLAM,品红为GTSAM。
4、增加传感器视角矢量噪声
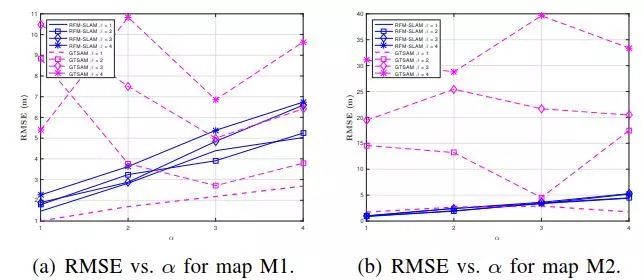
图6:当视野矢量噪声水平α为不同β增加时,机器人位置的RMSE值。
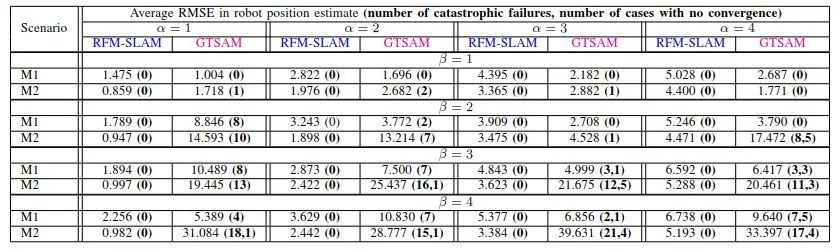
表1: 平均的机器人位置RMSE(米),包括灾难性故障的数量,以及由于里程计和视角矢量噪声的变化而在粗体括号中没有解决方案的实例数量。对于每个噪声和map组合,我们进行了50次模拟,并将姿态估计中的RMSE平均计算在这些模拟中(不包括GTSAM不收敛于某个解的运行)。

Abstract
The SLAM problem is known to have a special property that when robot orientation is known, estimating the history of robot poses and feature locations can be posed as a standard linear least squares problem. In this work, we develop a SLAM framework that uses relative feature-to-feature measurements to exploit this structural property of SLAM. Relative feature
measurements are used to pose a linear estimation problem for pose-to-pose orientation constraints. This is followed by solving an iterative non-linear on-manifold optimization problem to compute the maximum likelihood estimate for robot orientationgiven relative rotation constraints. Once the robot orientation is computed, we solve a linear problem for robot position and map estimation. Our approach reduces the computational burden of non-linear optimization by posing a smaller optimization problem as compared to standard graph-based methods for feature-based SLAM. Further, empirical results show our method avoids
catastrophic failures that arise in existing methods due to using odometery as an initial guess for non-linear optimization, while
its accuracy degrades gracefully as sensor noise is increased.We demonstrate our method through extensive simulations and comparisons with an existing state-of-the-art solver.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




