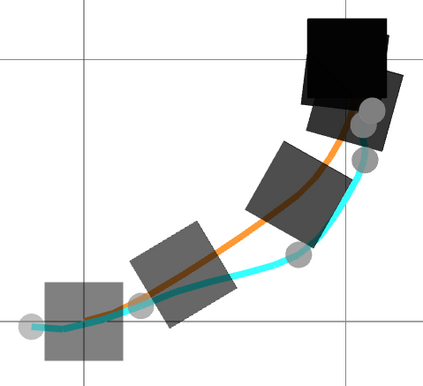
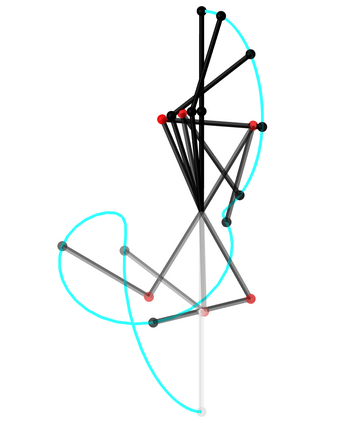
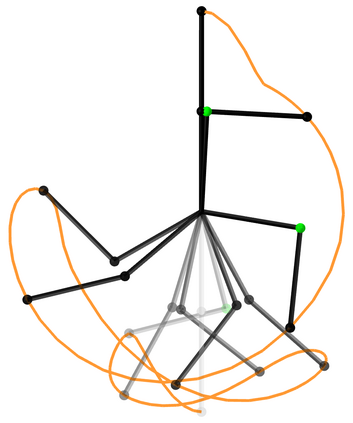
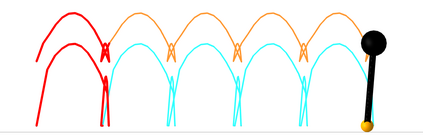
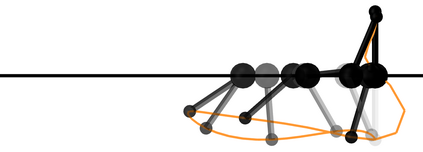
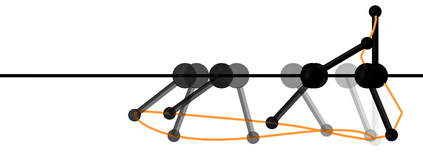
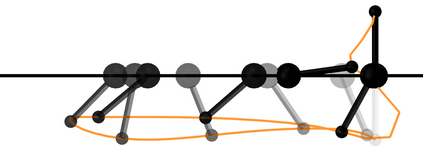
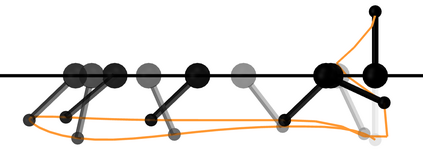
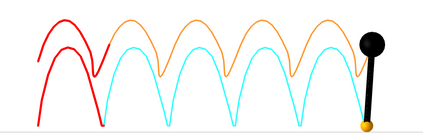
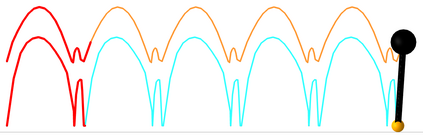
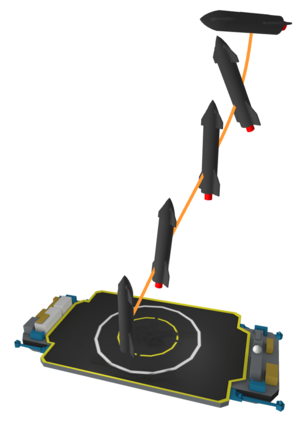
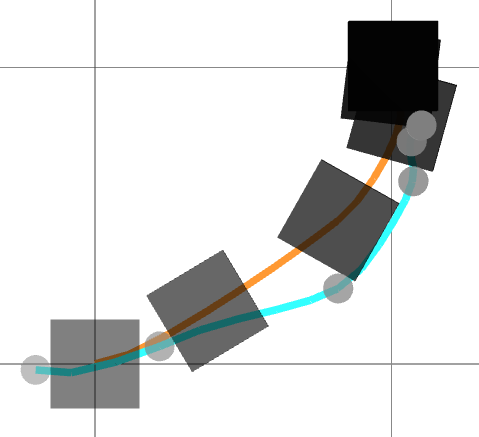
We present a framework for bi-level trajectory optimization in which a system's dynamics are encoded as the solution to a constrained optimization problem and smooth gradients of this lower-level problem are passed to an upper-level trajectory optimizer. This optimization-based dynamics representation enables constraint handling, additional variables, and non-smooth forces to be abstracted away from the upper-level optimizer, and allows classical unconstrained optimizers to synthesize trajectories for more complex systems. We provide a path-following method for efficient evaluation of constrained dynamics and utilize the implicit-function theorem to compute smooth gradients of this representation. We demonstrate the framework by modeling systems from locomotion, aerospace, and manipulation domains including: acrobot with joint limits, cart-pole subject to Coulomb friction, Raibert hopper, rocket landing with thrust limits, and planar-push task with optimization-based dynamics and then optimize trajectories using iterative LQR.
翻译:我们提出了一个双级轨迹优化框架,将系统的动态编码成系统优化问题的解决办法,将这一较低层次问题的平滑梯度传递到高层轨道优化器中。这种基于优化的动态代表能够将制约处理、额外变量和非吸附力从上层优化器中抽取出来,允许传统的未受限制优化器合成更复杂的系统轨迹。我们为高效评估受限动态提供了遵循路径的方法,并利用隐含功能的理论来计算这一表达方式的平滑梯度。我们通过从locotion、航空航天和操控领域建模系统来演示这一框架,包括:具有联合限制的作物、受Coulomb摩擦影响的马车极、Rabert型直升机、带有推力限制的火箭着陆,以及带有基于优化动态的平板推进任务,然后利用迭接式LQR优化轨迹。