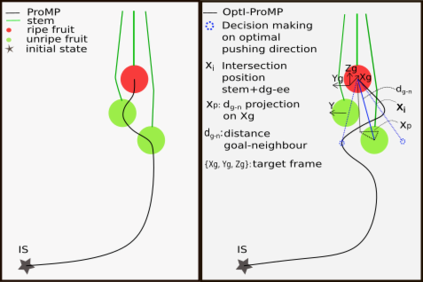
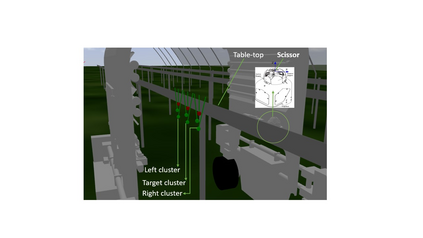
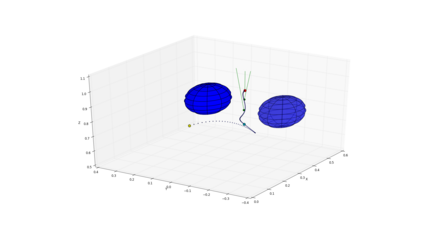
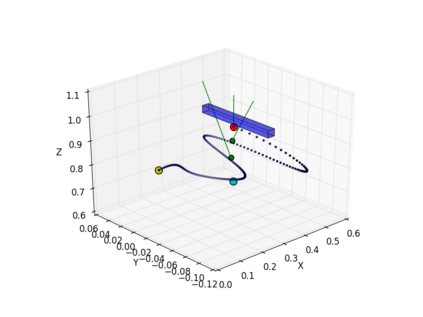
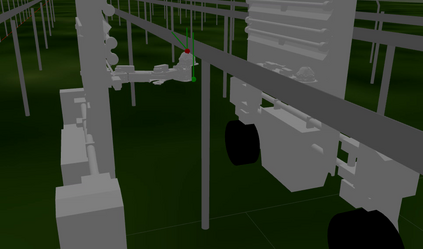
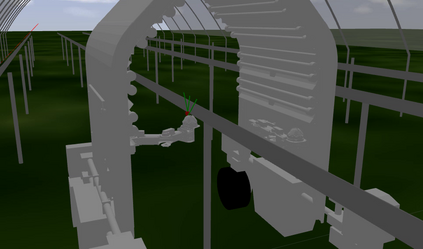
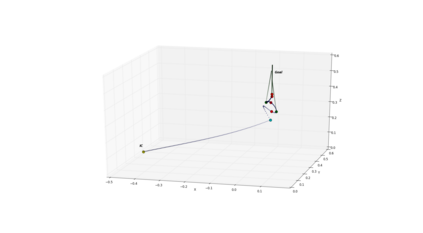
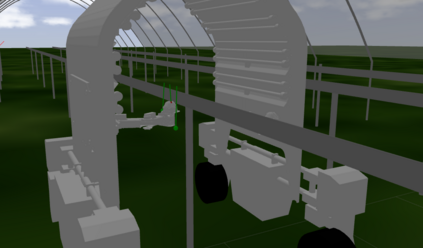
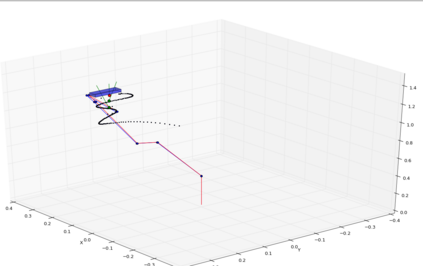
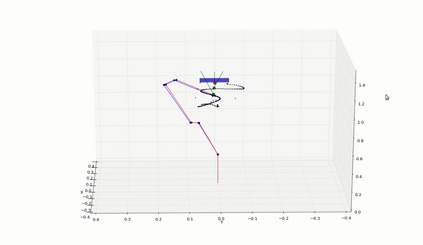
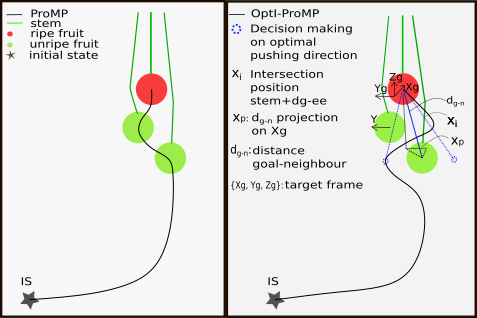
The majority of motion planning strategies developed over the literature for reaching an object in clutter are applied to two dimensional (2-d) space where the state space of the environment is constrained in one direction. Fewer works have been investigated to reach a target in 3-d cluttered space, and when so, they have limited performance when applied to complex cases. In this work, we propose a constrained multi-objective optimization framework (OptI-ProMP) to approach the problem of reaching a target in a compact clutter with a case study on soft fruits grown in clusters, leveraging the local optimisation-based planner CHOMP. OptI-ProMP features costs related to both static, dynamic and pushable objects in the target neighborhood, and it relies on probabilistic primitives for problem initialisation. We tested, in a simulated poly-tunnel, both ProMP-based planners from literature and the OptI-ProMP, on low (3-dofs) and high (7-dofs) dexterity robot body, respectively. Results show collision and pushing costs minimisation with 7-dofs robot kinematics, in addition to successful static obstacles avoidance and systematic drifting from the pushable objects center of mass.
翻译:在文献中,为达到杂乱物体而制定的大部分运动规划战略应用到环境状态空间受限制的两维(2-d)空间,在三维杂乱空间中,为达到目标而调查的作品较少,当应用到复杂案件时,其性能有限。在这项工作中,我们提议一个受限制的多目标优化框架(Opti-ProMP),以利用基于本地优化的规划器CHOMP。Opti-ProMP与目标周围静态、动态和可推力物体有关的成本相对较少。我们在模拟多球中测试了来自文献和Opti-ProMP的以ProMP为基础的规划师,以在对软水果集群中增长的案例研究中达到一个目标的问题,利用基于本地优化的规划器的CHOMMP。Opti-ProMP的特征与目标周围的静态、动态和可推力物体相关的成本,并依靠概率性原始的原始设备来进行问题初始化。我们在模拟多球中测试了Propti-ProMP的文献和Opti-ProMP的策划者,在低度(3-dps)和高度(7-dofs)极易移动机器人体机器人体体体体上,分别测试成功。结果显示相碰撞和将目标与7-中流流式移动障碍的最小化物体从7-中向成功的中心向成功的中流压低压和推压成本。