无人机视觉挑战赛 | ICCV 2019 Workshop—VisDrone2019

14 different cities spanning thousands of kilometers
采集遍布中国14个城市
272117 video frames/images
272117张视频帧/图像
2.6 million bounding boxes
260万个标注框
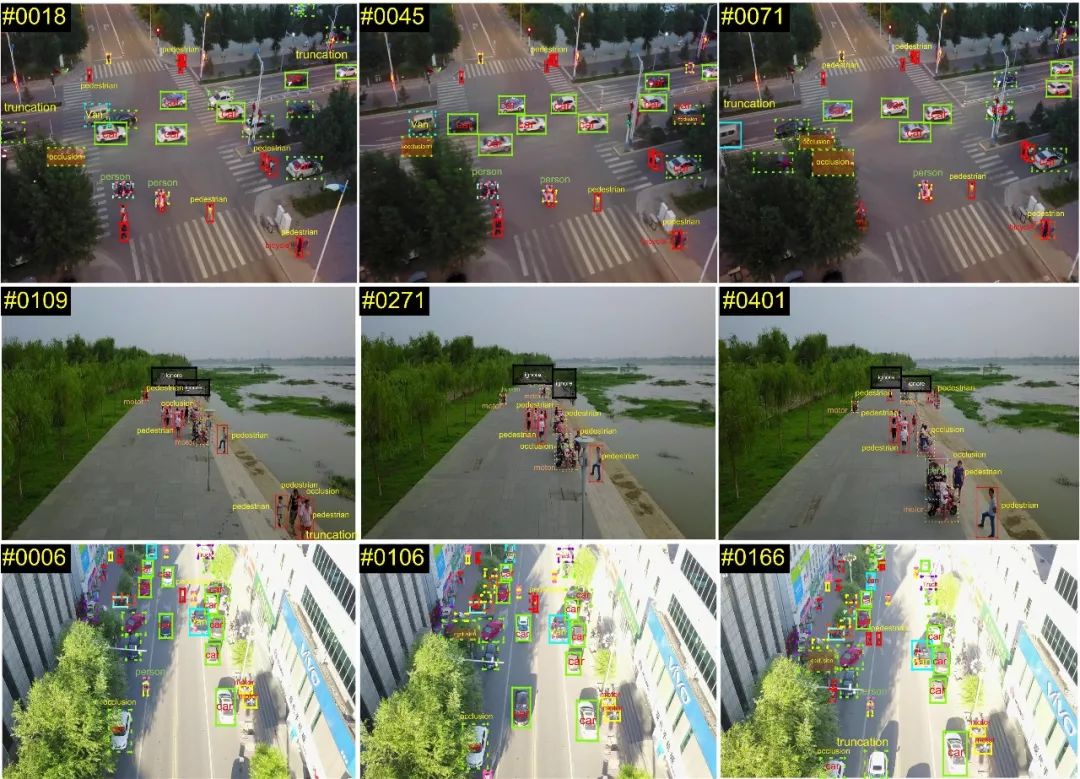
Task 1: object detection in images
The task aims to detect objects of predefined categories (e.g., cars and pedestrians) from individual images taken from drones.
Task 2: object detection in videos
The task is similar to Task 1, except that objects are required to be detected from videos.
Task 3: single-object tracking
The task aims to estimate the state of a target, indicated in the first frame, in the subsequent video frames.
Task 4: multi-object tracking
The task aims to recover the trajectories of objects in each video frame.
Task1: object detection in images

Task2: object detection in videos
Task3: single-object tracking

Task4: multi-object tracking

Website open: April 25, 2019
Data available: April 25, 2019
Submission deadline: TBD
Author notification: TBD
Workshop date: TBD
Camera-ready due: TBD
Pengfei Zhu
Tianjin University

Longyin Wen
JD Digits
Dawei Du
University AT Albany, SUNY

Xiao Bian
GE Global Research

Qinghua Hu
Tianjin University

Haibin Ling
Temple University
Liefeng Bo (JD Digits, USA)
Hamilton Scott Clouse (US Airforce Research)
Liyi Dai (US Army Research Office)
Riad I. Hammound (BAE Systems, USA)
David Jacobs (Univ. Maryland College Park, USA)
SiweiLyu (Univ. At Albany, SUNY, USA)
Stan Z. Li (Institute of Automation, Chinese Academy of Sciences, China)
Fuxin Li (Oregon State Univ.,USA)
Anton Milan (Amazon Research and Development Center, Germany)
Hailin Shi (JD AI Research)
Siyu Tang (Max Planck Institute forIntelligent Systems, Germany)
Technical Committee

Hailin Shi
JD AI Research
Tao Peng
Tianjin University

Jiayu Zheng
Tianjin University

Yue Si
JD AI Research

Xiaolu Li
Tianjin University

Wenya Ma
Tianjin University
Sponsor

Website:http://www.aiskyeye.com
Email:tju.drone.vision@gmail.com
WeChat Official Accounts


点击“阅读原文”进入VisDrone2019官网




