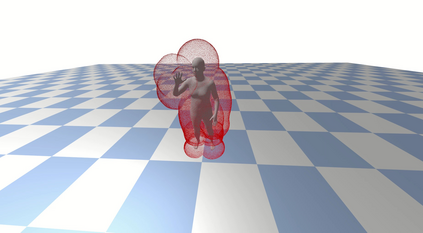
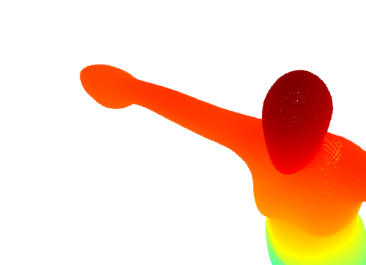
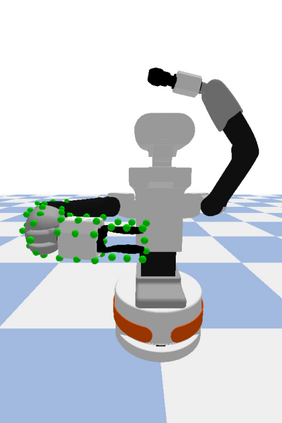
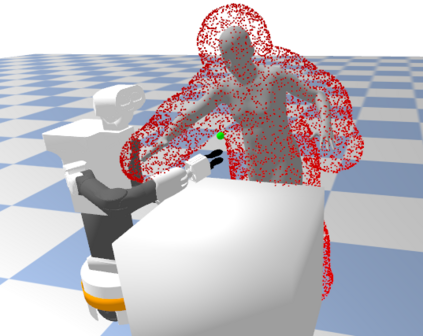
Autonomous robots should operate in real-world dynamic environments and collaborate with humans in tight spaces. A key component for allowing robots to leave structured lab and manufacturing settings is their ability to evaluate online and real-time collisions with the world around them. Distance-based constraints are fundamental for enabling robots to plan their actions and act safely, protecting both humans and their hardware. However, different applications require different distance resolutions, leading to various heuristic approaches for measuring distance fields w.r.t. obstacles, which are computationally expensive and hinder their application in dynamic obstacle avoidance use-cases. We propose Regularized Deep Signed Distance Fields (ReDSDF), a single neural implicit function that can compute smooth distance fields at any scale, with fine-grained resolution over high-dimensional manifolds and articulated bodies like humans, thanks to our effective data generation and a simple inductive bias during training. We demonstrate the effectiveness of our approach in representative simulated tasks for whole-body control (WBC) and safe Human-Robot Interaction (HRI) in shared workspaces. Finally, we provide proof of concept of a real-world application in a HRI handover task with a mobile manipulator robot.
翻译:自主机器人应在现实世界的动态环境中运作,并与紧密空间中的人类合作。允许机器人离开结构化实验室和制造环境的一个关键组成部分是,他们能够评价与周围世界的在线和实时碰撞。远程限制对于机器人能够规划其行动和安全地采取行动,保护人类及其硬件至关重要。然而,不同的应用需要不同的距离分辨率,导致不同的超常方法来测量距离场(w.r.t.)障碍,这些障碍在计算上昂贵,并阻碍其在动态障碍避免使用情况下的应用。我们提议了常规化的深超距离场(REDSDF),这是一个单一的神经隐含功能,可以刻出任何规模的平滑的距离场,对高方位的元和像人类这样清晰的体形体进行精细的解析,这要归功于我们有效的数据生成和在培训中简单的感应偏差。我们展示了我们在具有代表性的模拟任务中的方法的有效性,这些模拟任务用于整体控制(WBC)和安全的人类机器人互动(HRI)在共享的工作空间中的模拟任务。最后,我们提供了在一个配置机器人的移动机器人中提供真实世界应用概念的证据。