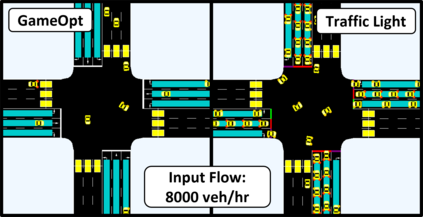
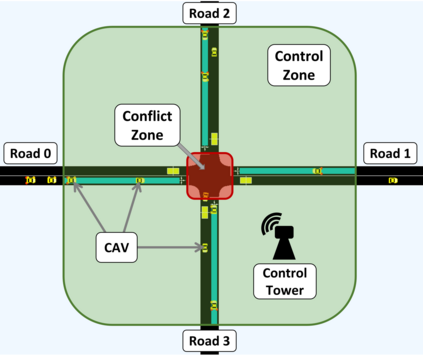
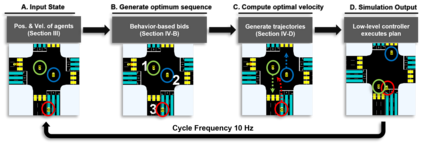
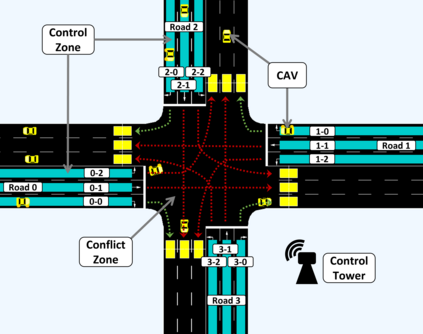
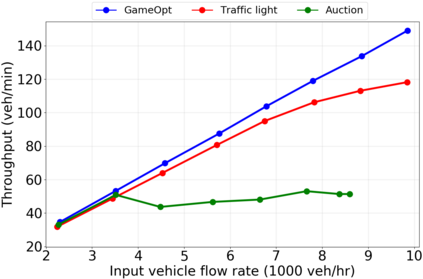
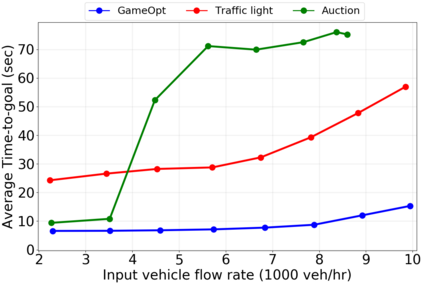
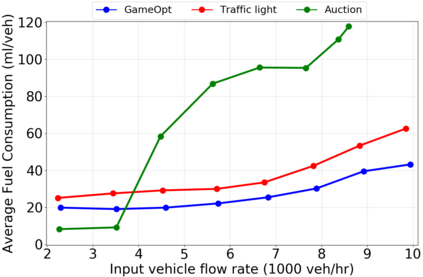
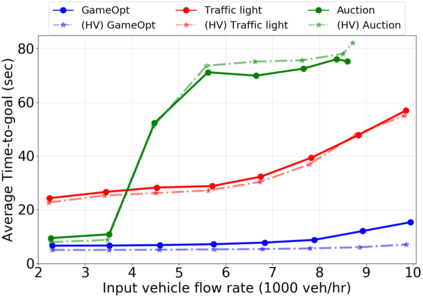
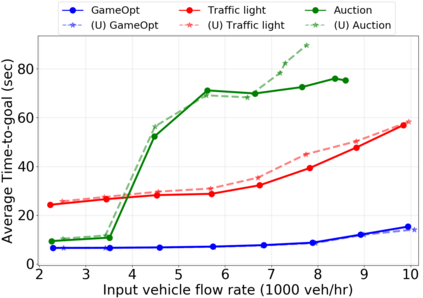
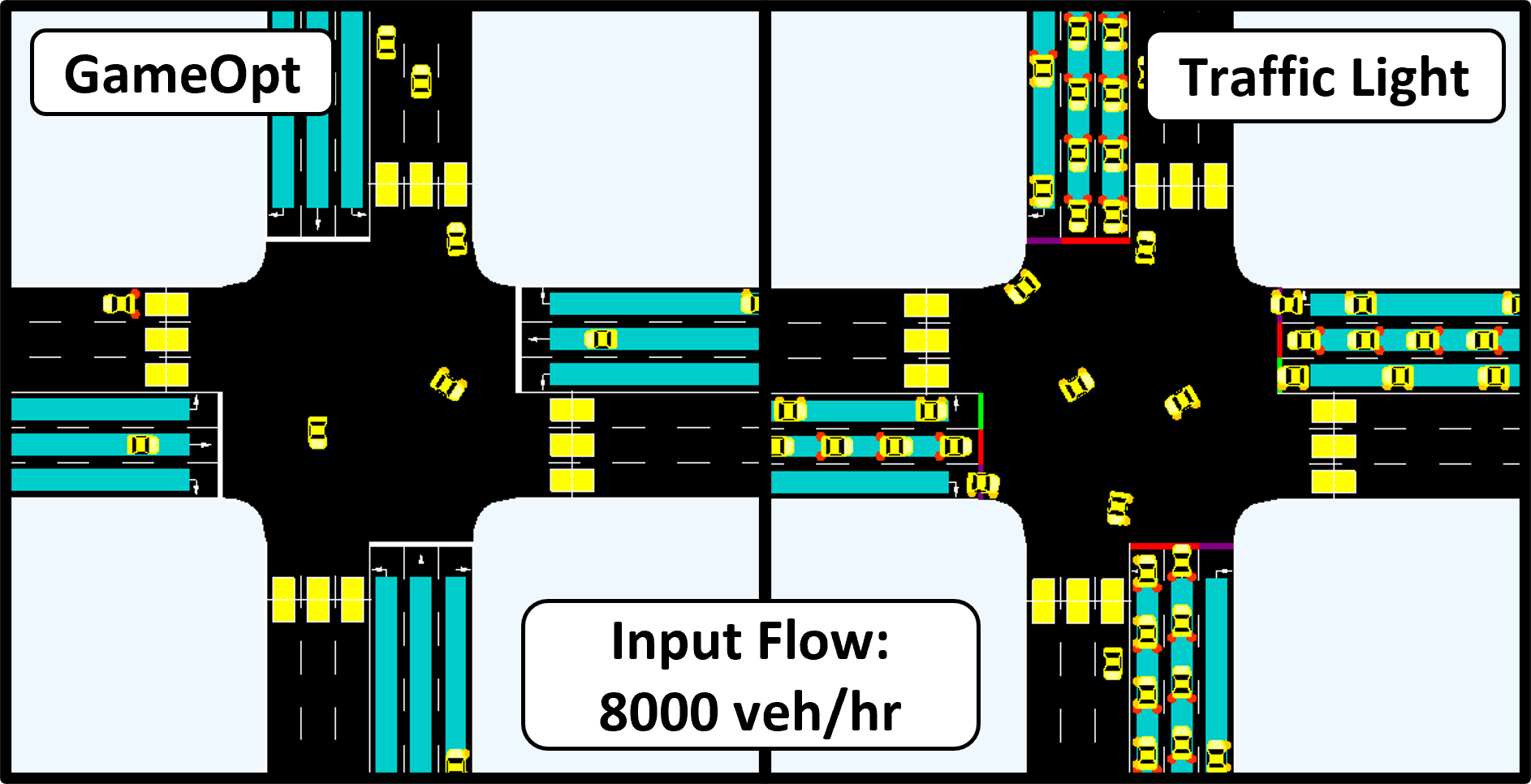
Non-signalized intersections are one of the more complex, prone to accident scenarios faced in modern transportation networks. Cooperation among Connected Autonomous Vehicles (CAVs) is a promising approach to intersection control which provides increased safety, efficiency and fairness. We propose a novel hierarchical approach to navigating these dynamic, multi-lane, intersections. Our algorithm consists of a hierarchical formulation that first uses an auction mechanism to generate a priority order over all the agents, followed by an optimization-based trajectory planner that computes the optimal velocity commands that respects the priority order. The coupling of an auction mechanism for generating a vehicle entrance sequence and an optimization mechanism for trajectory planning, allows for real-time capable operation in high density multi-agent traffic, while providing formal guarantees in terms of fairness, safety, and efficiency. Our approach can operate at real-time speeds ($<10$ milliseconds), which is at least $40\times$ faster than prior methods. Tested on the SUMO simulator, our algorithm reduces congestion by at least $60\%$, time taken to reach the goal by $75\%$, and fuel consumption by $33\%$, compared to auction-based approaches and signaled approaches using traffic-lights and stop signs.
翻译:未发信号的十字路口是现代运输网络面临的更为复杂、容易发生事故的复杂情况之一。连接的自治车辆之间的合作是具有希望的交叉控制方法,它提供了更高的安全、效率和公平性。我们提出了一种新型的分级方法来引导这些动态的、多长的、多长的交叉路口。我们的算法包括一种等级配方,它首先使用拍卖机制对所有代理商产生优先秩序,然后以优化为基础的轨迹规划器计算符合优先秩序的最佳速度命令。连接的自动机动车辆之间的合作是产生车辆入口序列的拍卖机制以及轨道规划优化机制的结合,允许在高密度多剂交通中实时操作,同时在公平、安全和效率方面提供正式保证。我们的算法可以实时速度运行( < 10 毫秒),它至少40美元,比以前的方法快。在SUMO模拟器上测试,我们的算法将拥塞至少60美元,达到目标的时间为75 ⁇ 美元,燃料消耗量为33美元,与以拍卖为基础的信号和信号节点相比,使用33美元。