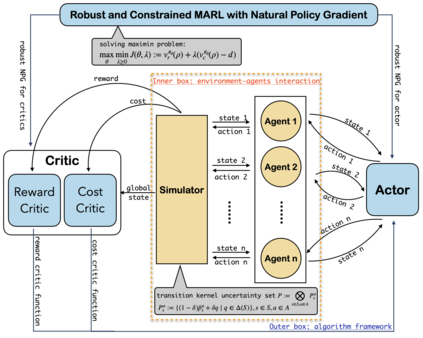
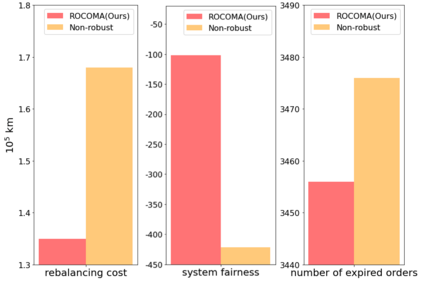
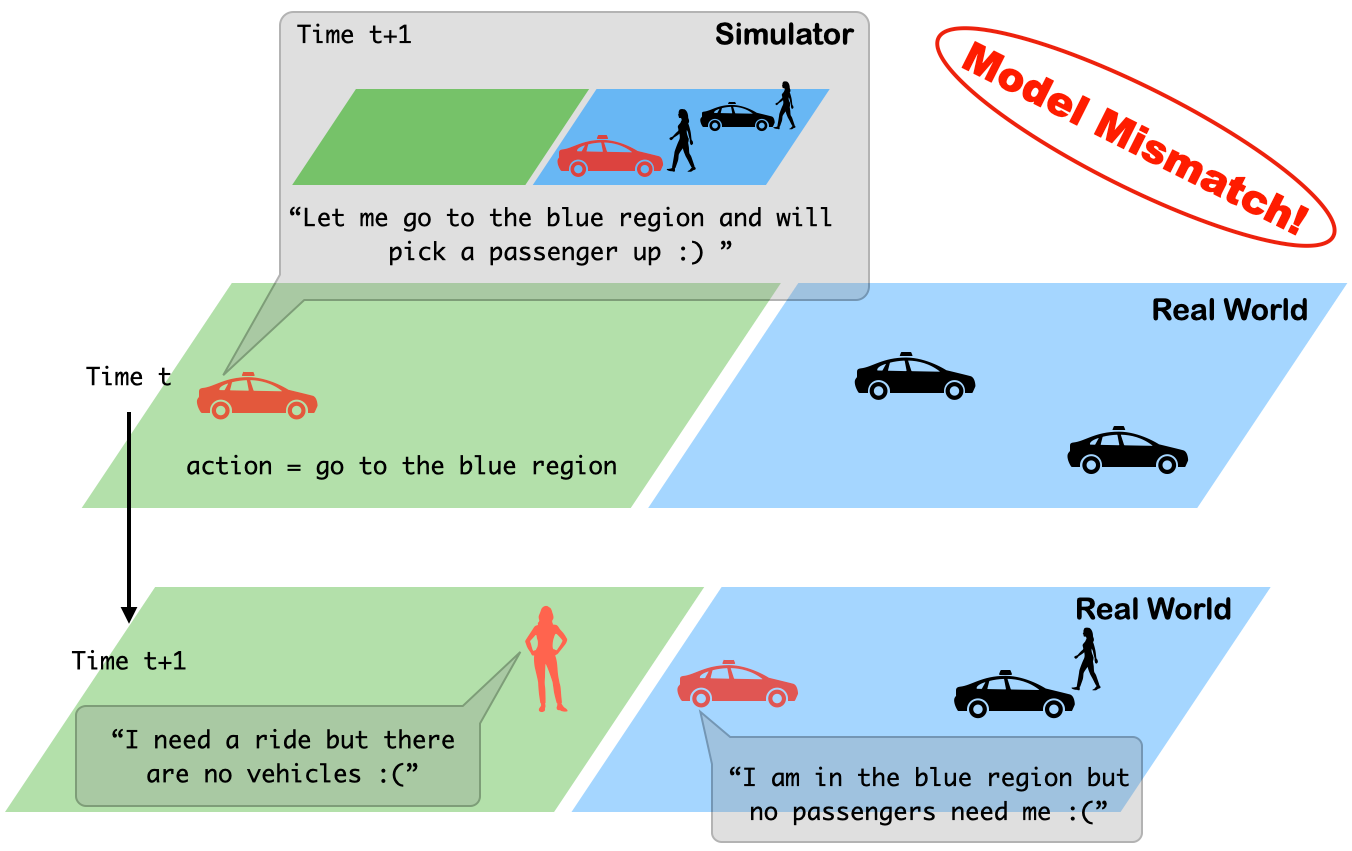
Electric vehicles (EVs) play critical roles in autonomous mobility-on-demand (AMoD) systems, but their unique charging patterns increase the model uncertainties in AMoD systems (e.g. state transition probability). Since there usually exists a mismatch between the training and test/true environments, incorporating model uncertainty into system design is of critical importance in real-world applications. However, model uncertainties have not been considered explicitly in EV AMoD system rebalancing by existing literature yet, and the coexistence of model uncertainties and constraints that the decision should satisfy makes the problem even more challenging. In this work, we design a robust and constrained multi-agent reinforcement learning (MARL) framework with state transition kernel uncertainty for EV AMoD systems. We then propose a robust and constrained MARL algorithm (ROCOMA) with robust natural policy gradients (RNPG) that trains a robust EV rebalancing policy to balance the supply-demand ratio and the charging utilization rate across the city under model uncertainty. Experiments show that the ROCOMA can learn an effective and robust rebalancing policy. It outperforms non-robust MARL methods in the presence of model uncertainties. It increases the system fairness by 19.6% and decreases the rebalancing costs by 75.8%.
翻译:暂无翻译