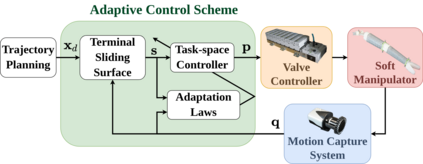
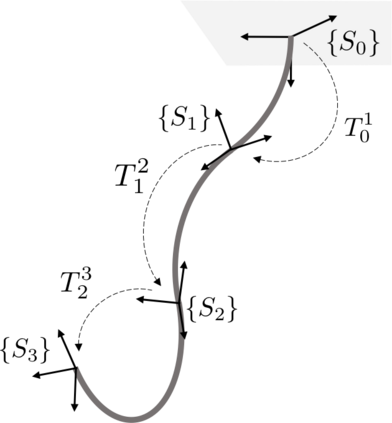
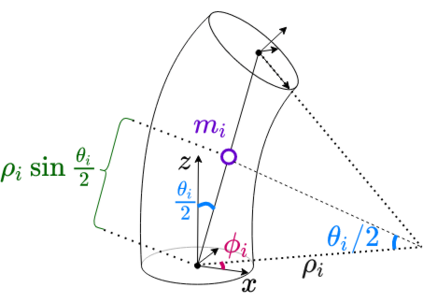
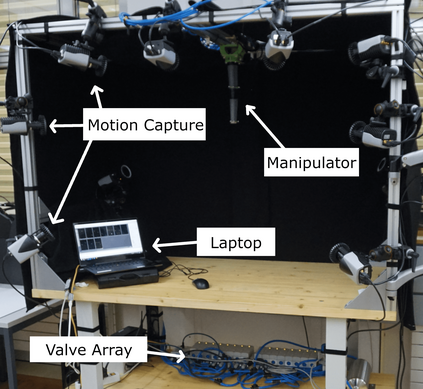
Soft robots are made of compliant and deformable materials and can perform tasks challenging for conventional rigid robots. The inherent compliance of soft robots makes them more suitable and adaptable for interactions with humans and the environment. However, this preeminence comes at a cost: their continuum nature makes it challenging to develop robust model-based control strategies. Specifically, an adaptive control approach addressing this challenge has not yet been applied to physical soft robotic arms. This work presents a reformulation of dynamics for a soft continuum manipulator using the Euler-Lagrange method. The proposed model eliminates the simplifying assumption made in previous works and provides a more accurate description of the robot's inertia. Based on our model, we introduce a task-space adaptive control scheme. This controller is robust against model parameter uncertainties and unknown input disturbances. The controller is implemented on a physical soft continuum arm. A series of experiments were carried out to validate the effectiveness of the controller in task-space trajectory tracking under different payloads. The controller outperforms the state-of-the-art method both in terms of accuracy and robustness. Moreover, the proposed model-based control design is flexible and can be generalized to any continuum robotic arm with an arbitrary number of continuum segments.
翻译:软体机器人是由兼容和变形材料制成的,可以执行对常规硬体机器人具有挑战性的任务。软体机器人的内在合规性使其更适合和适应与人类和环境的相互作用。然而,这种突出性是代价高昂的:它们具有连续性,因此难以制定强有力的模型控制战略。具体地说,尚未对软体机器人手臂应用应对这一挑战的适应性控制方法。这项工作为使用Euler-Lagrange方法的软连续操纵器重新配置了动态。拟议的模型消除了先前工程的简化假设,并更准确地描述了机器人的惯性。基于我们的模型,我们引入了一个任务空间适应性控制方案。这个控制器在模型参数不确定性和未知输入干扰方面是很强的。控制器是在一个物理软体连续臂上实施的。进行了一系列实验,以验证控制器在不同有效载荷下跟踪任务空间轨迹时的有效性。控制器在准确性和稳健性方面都超越了最新设计的方法。此外,拟议的模型控制系统设计可以任意性地向任何连续连续体。