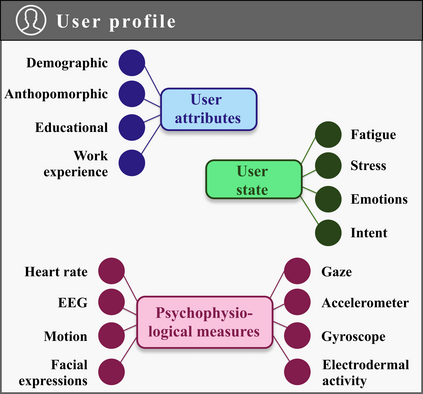
Learning from Demonstration (LfD) has been established as the dominant paradigm for efficiently transferring skills from human teachers to robots. In this context, the Federated Learning (FL) conceptualization has very recently been introduced for developing large-scale human-robot collaborative environments, targeting to robustly address, among others, the critical challenges of multi-agent learning and long-term autonomy. In the current work, the latter scheme is further extended and enhanced, by designing and integrating a novel user profile formulation for providing a fine-grained representation of the exhibited human behavior, adopting a Deep Learning (DL)-based formalism. In particular, a hierarchically organized set of key information sources is considered, including: a) User attributes (e.g. demographic, anthropomorphic, educational, etc.), b) User state (e.g. fatigue detection, stress detection, emotion recognition, etc.) and c) Psychophysiological measurements (e.g. gaze, electrodermal activity, heart rate, etc.) related data. Then, a combination of Long Short-Term Memory (LSTM) and stacked autoencoders, with appropriately defined neural network architectures, is employed for the modelling step. The overall designed scheme enables both short- and long-term analysis/interpretation of the human behavior (as observed during the feedback capturing sessions), so as to adaptively adjust the importance of the collected feedback samples when aggregating information originating from the same and different human teachers, respectively.
翻译:从演示(LfD)中学习,这是有效将技能从人类教师向机器人转移的主导范例,在这方面,最近采用了联邦学习(FL)概念化,以发展大规模人类机器人合作环境,目标是大力应对多机构学习和长期自主等重大挑战;在目前的工作中,后一种办法被进一步扩展和加强,方法是设计和整合新的用户配置,以提供所展示的人类行为精细代表,采用深思熟虑(DL)形式主义;特别是,考虑一系列分级组织的关键信息来源,包括:(a) 用户属性(如人口、人类形态、教育等)、b) 用户状态(如疲劳检测、压力检测、情感认知等)和(c) 心理生理测量(如凝视、电击活动、心脏率等),从长期记忆(LSTM)和堆叠式自成结构化的一组关键信息来源,在采用长期模型进行人类结构分析时,从结构模型化到长期的模型化分析,从结构模型化分析,从结构分析,从结构分析,从结构分析,从结构分析到结构分析,从结构分析,从结构分析,从结构分析从结构分析,从结构分析从结构分析从结构分析到结构分析到结构分析,观察到结构分析到结构分析,观察到结构分析,其总体分析,分析从结构分析从结构分析从结构分析从结构分析从结构分析的正确。