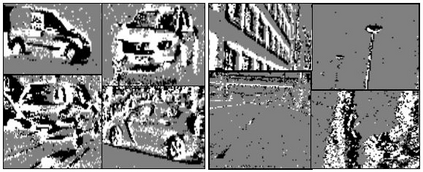
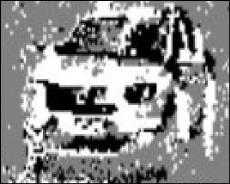
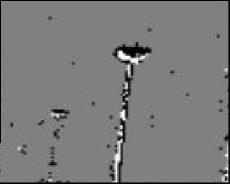
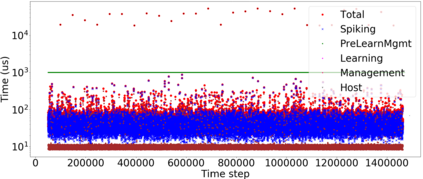
Autonomous Driving (AD) related features provide new forms of mobility that are also beneficial for other kind of intelligent and autonomous systems like robots, smart transportation, and smart industries. For these applications, the decisions need to be made fast and in real-time. Moreover, in the quest for electric mobility, this task must follow low power policy, without affecting much the autonomy of the mean of transport or the robot. These two challenges can be tackled using the emerging Spiking Neural Networks (SNNs). When deployed on a specialized neuromorphic hardware, SNNs can achieve high performance with low latency and low power consumption. In this paper, we use an SNN connected to an event-based camera for facing one of the key problems for AD, i.e., the classification between cars and other objects. To consume less power than traditional frame-based cameras, we use a Dynamic Vision Sensor (DVS). The experiments are made following an offline supervised learning rule, followed by mapping the learnt SNN model on the Intel Loihi Neuromorphic Research Chip. Our best experiment achieves an accuracy on offline implementation of 86%, that drops to 83% when it is ported onto the Loihi Chip. The Neuromorphic Hardware implementation has maximum 0.72 ms of latency for every sample, and consumes only 310 mW. To the best of our knowledge, this work is the first implementation of an event-based car classifier on a Neuromorphic Chip.
翻译:自动驾驶(AD)相关特征提供了新的流动形式,这些形式也有利于其他智能和自主系统,如机器人、智能交通和智能行业。对于这些应用,需要快速和实时地做出决定。此外,在追求电力流动时,这项任务必须遵循低功率政策,同时不影响运输工具或机器人的自主性。这两个挑战可以使用新兴的Spiking神经网络(SNNS)来应对。当部署在专门的神经形态硬件上时,SNNN能够以低延迟和低电耗实现高性能。在本文中,我们使用一个与事件相机连接的 SNNN来应对AD(即汽车和其他物体的分类)的关键问题之一。此外,在追求电力流动时,这项任务必须遵循低功率的视觉传感器(DVS)。实验遵循了离线监督的学习规则,随后在Intel Lohi Neurorturation研究芯片上绘制了学到的SNNNNE模型。我们的最佳实验是在离线运行时实现一个精度的精确度, 也就是执行LoFSDRO的8.% 。在运行时, 最精确到最精确的运行时,这是最精确到最精确的轨道, 的运行到最精度, 的运行到最精度是最精确到最精确到最精确到最深的LOPLIPLIPDLVDLVDRPDFPDFPDPDODO。