今日 Paper | 3D手势估计;自学习机器人;鲁棒语义分割;卷积神经网络;混合高斯过程等
目录
Self learning robot using real-time neural networks
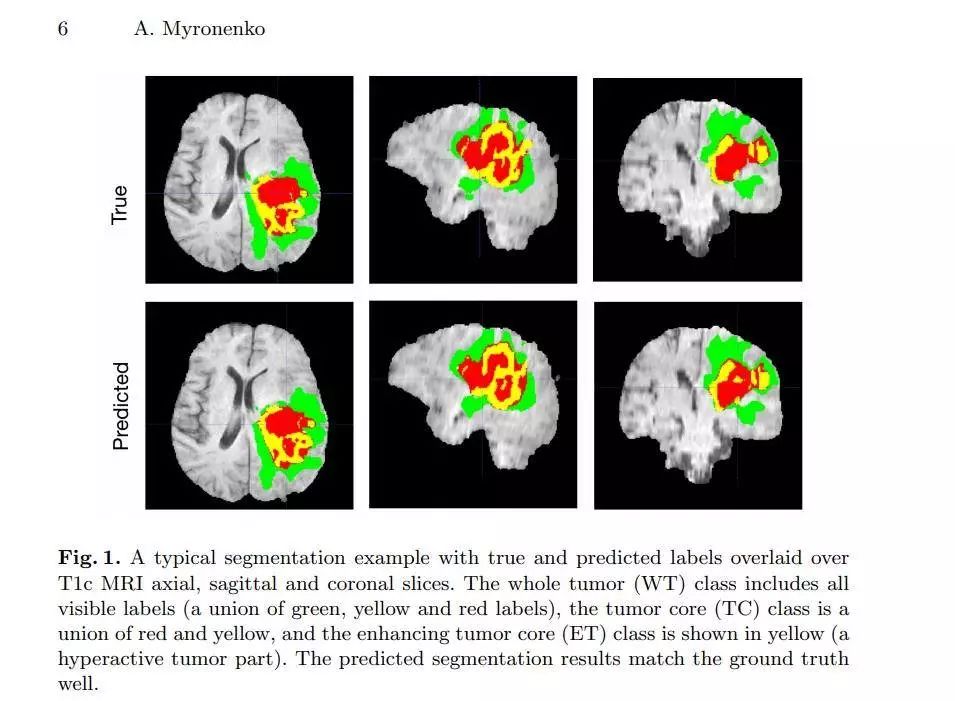
Robust Semantic Segmentation of Brain Tumor Regions from 3D MRIs
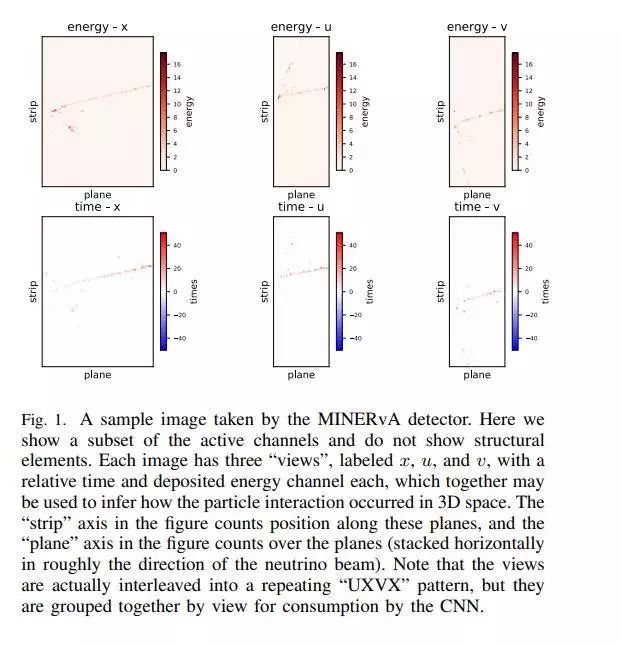
Inferring Convolutional Neural Networks' accuracies from their architectural characterizations
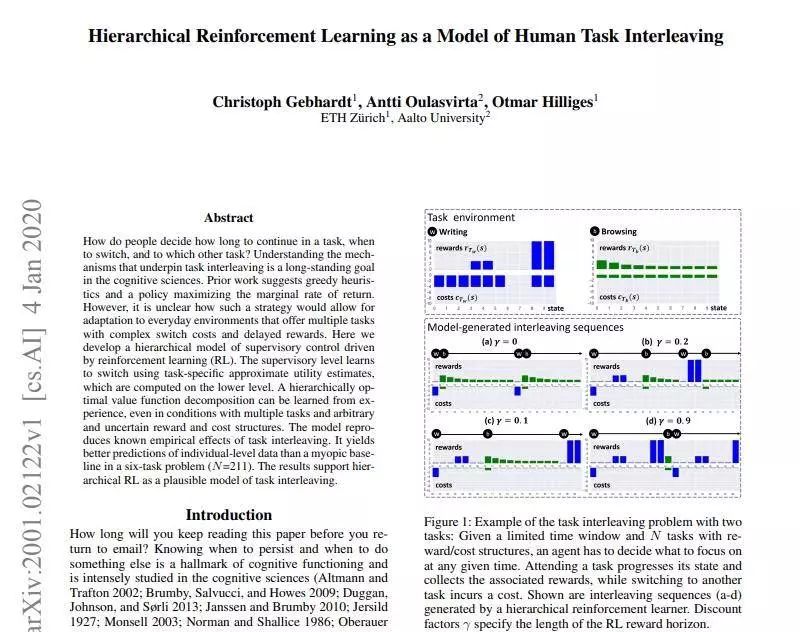
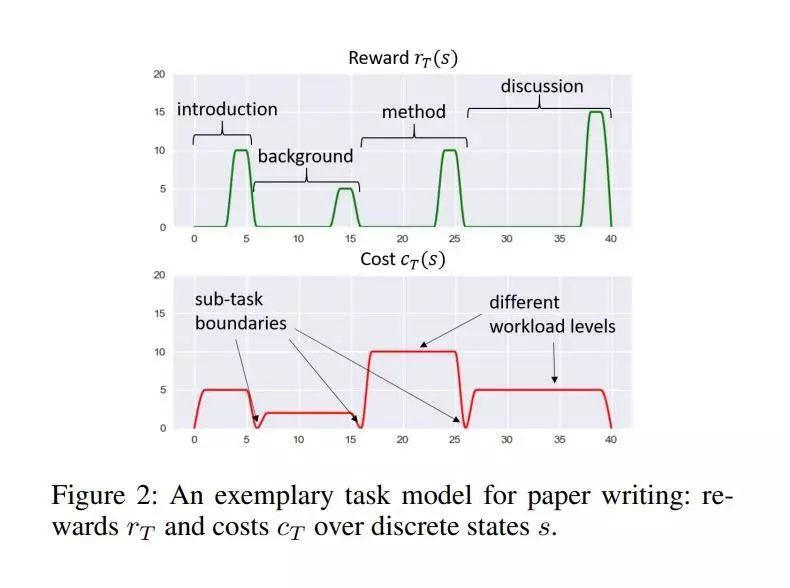
Hierarchical Reinforcement Learning as a Model of Human Task Interleaving
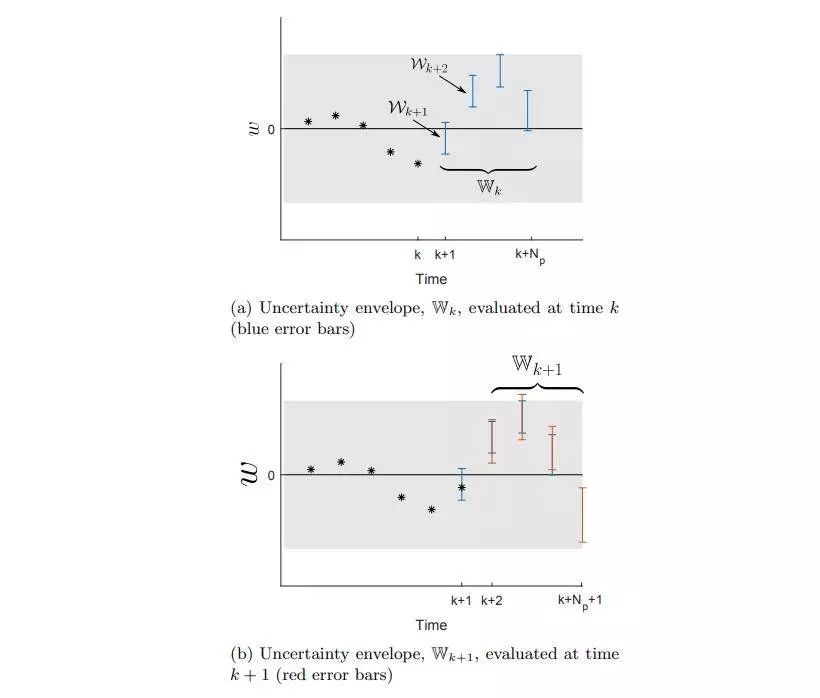
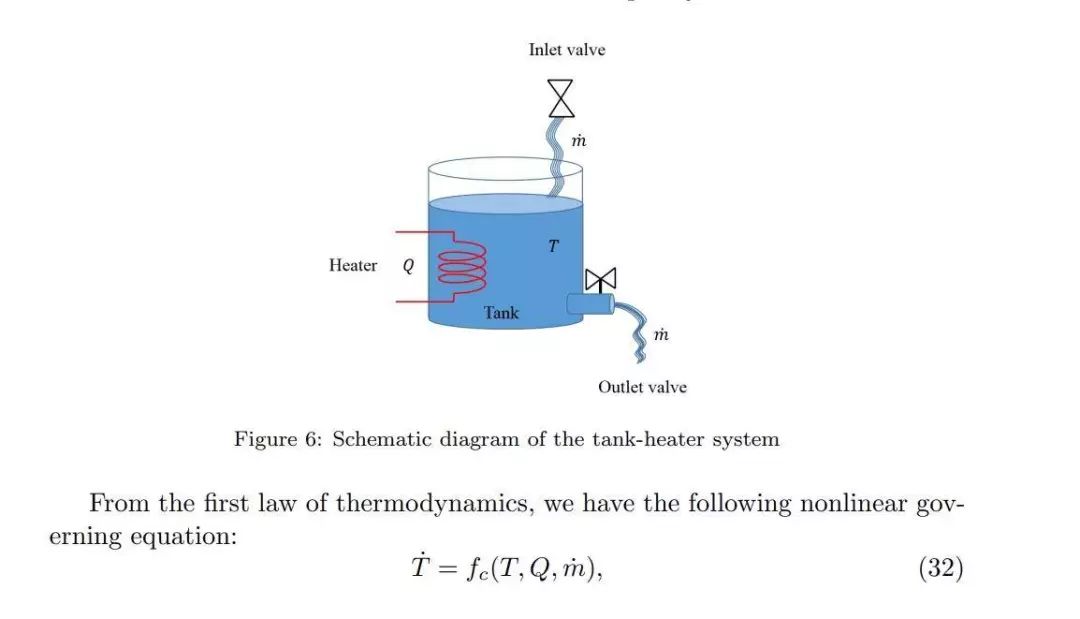
A Hybrid Gaussian Process Approach to Robust Economic Model Predictive Control
Attributed Multi-Relational Attention Network for Fact-checking URL Recommendation
Data Structure Primitives on Persistent Memory: An Evaluation
HandAugment: A Simple Data Augmentation for HANDS19 Challenge Task 1 -- Depth-Based 3D Hand Pose Estimation
From 'F' to 'A' on the N.Y. Regents Science Exams: An Overview of the Aristo Project
Information Theoretic Model Predictive Q-Learning
使用实时神经网络的自学习机器人
从3D MRI进行脑肿瘤区域的鲁棒语义分割
从卷积神经网络的架构特征推断出其准确性
分层强化学习作为人类任务交织的模型
鲁棒经济模型预测控制的混合高斯过程方法
拓展阅读
事实检测URL推荐的属性多关系注意力网络
论文名称:Attributed Multi-Relational Attention Network for Fact-checking URL Recommendation
持久内存的数据结构原语:一种评估
论文名称:Data Structure Primitives on Persistent Memory: An Evaluation
HandAugment:一种用于HANDS19挑战任务1-基于深度的3D手势估计的简单数据增强方法
论文名称:HandAugment: A Simple Data Augmentation for HANDS19 Challenge Task 1 -- Depth-Based 3D Hand Pose Estimation
纽约摄政科学考试从“ F”到“ A”:Aristo项目概述
论文名称:From 'F' to 'A' on the N.Y. Regents Science Exams: An Overview of the Aristo Project
信息理论模型预测Q学习
论文名称:Information Theoretic Model Predictive Q-Learning






